
磁盘驱动器磁头控制系统

实验题目:磁盘驱动器磁头控制系统
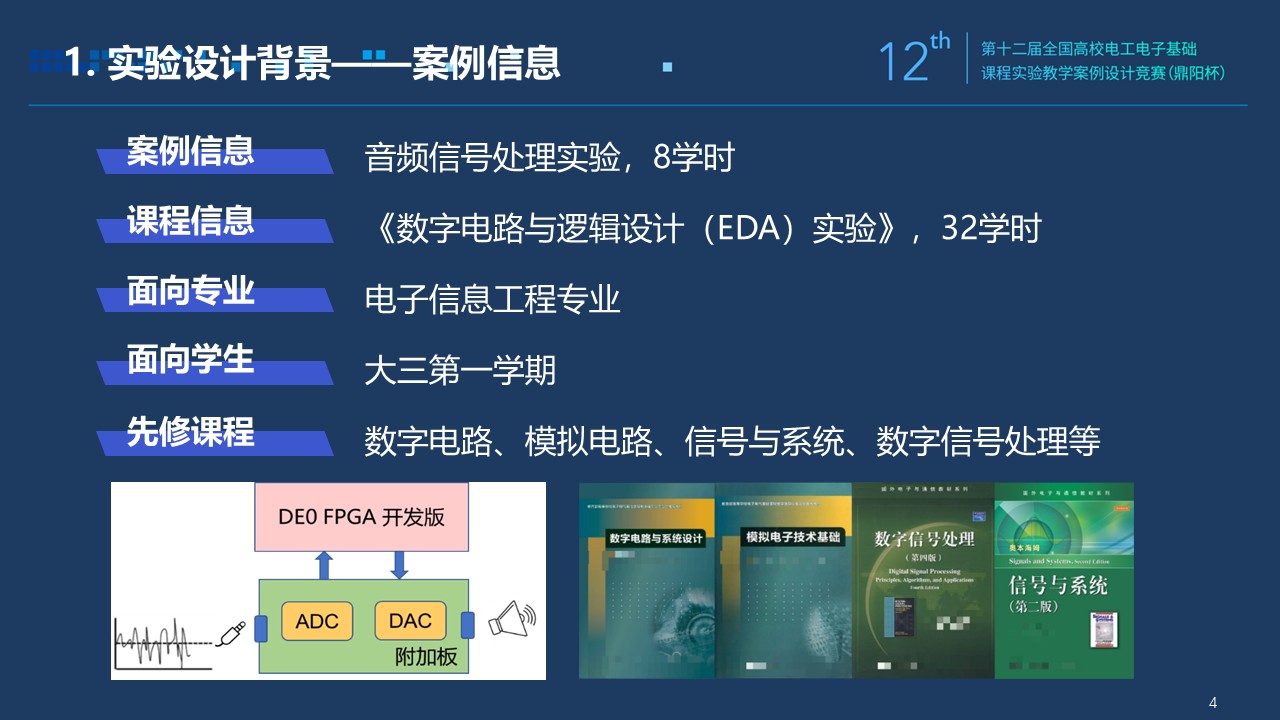
课程简要信息
课程名称:信号与系统
课程体系/类别:专业类/专业核心课
课程性质:必修
学时/学分:48学时/3学分
适用专业:通信工程、信息工程、轨道交通信号与控制、自动化、电子科学与技术等
学生年级:大二上学期
实验内容与任务(限500字,可与“实验过程及要求”合并)
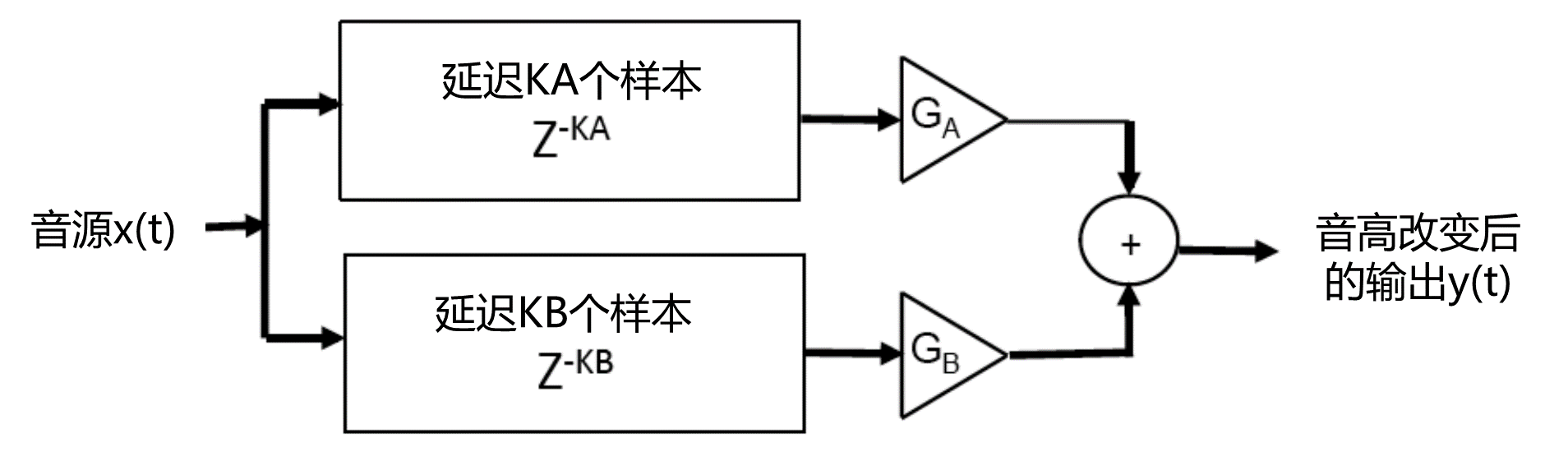
在复频域内对给定的“磁盘驱动器磁头控制系统”进行建模与分析,探讨磁头控制器及其参数对系统动态、稳态性能指标的影响。系统框图如图1所示。
图1 磁盘驱动器磁头控制系统框图
- 基础部分(70分)
a. 根据执行电机、读取臂和传感器在时域的输入输出关系及参数建立各子系统函数G1(s)、G2(s)和Q(s),分析这些子系统函数的物理含义。
b. 设Gc(s) =
Kp,即控制器为增益是Kp的比例放大器,写出系统函数H(s)
θ(s)/X(s),*Kp取不同值时,用MATLAB绘制系统的极点分布图,给出使系统稳定的Kp*取值范围。
c. 当系统稳定时,利用Laplace变换终值定理计算系统的稳态误差ess,分析*Kp*对稳态误差的影响。
- 提高部分(20分)
用MATLAB绘制K
p取不同值时系统的单位阶跃响应曲线,分别计算超调量∆和寻道时间ts(误差范围取±2%),说明*Kp*的取值大小对超调量和寻道时间的影响。
- 拓展部分(10分)
设G
c(s) = Kd(s +Td),即比例/微分(PD)控制器,用MATLAB绘制Kd、*Td取不同值时系统的单位阶跃响应曲线,分析Kd和Td*大小对超调量和寻道时间的影响,说明PD控制器与比例控制器相比对这两个性能指标提升起到的作用。
实验过程及要求(限300字)
本实验包括系统分析与设计、仿真实现、报告撰写、答辩四个环节构成,要求学生以小组为单位完成。
系统分析与设计包括问题分析、文献查阅、问题解决,具体包括:写出系统函数,分析控制器参数对系统稳定性、阶跃响应的稳态性能和动态性能指标的影响。
用MATLAB对上述分析和设计方案进行仿真实现和验证,并总结形成实验报告。
答辩要求学生以PPT形式讲解分析实验原理,展示系统实际效果,教师对小组的每个学生提岀问题并予以评价。
相关知识及背景(限150字)
磁盘是生活、学习和工作中的常用设备,对磁盘驱动器的磁头控制系统进行分析需要运用系统函数、零极点分布、稳定性、稳态性能、动态性能等相关知识、方法和工程概念,并涉及MATLAB软件仿真等技术。
实验环境条件
个人计算机、MATLAB软件等。
教学目标与目的(限150字)
实验面向工程实际问题,使学生将Laplace变换、系统函数、零极点分布、稳定性等课堂理论与身边常见物理系统建立联系,加深对相关理论的理解,掌握利用MATLAB等技术手段实现系统分析和设计的基本方法,培养学生的工程实践能力和创新意识。同时,实验以小组为单位完成,培养学生的团队协作、报告撰写和演讲表达能力。
教学设计与实施进程
实验包括课堂讲解、课下分组实验、撰写报告及课堂集中答辩点评等环节。
1)课堂讲授:在课堂讲解过程中,教师讲解磁盘驱动器磁头控制系统的基本原理和分析设计方案,包括实际工程背景、问题的分析、解决思路、信息收集与文献资料查阅、实验报告的撰写规范等内容。在课堂上布置本次实验要求学生完成的具体任务,明确课程考核要求。
2)分组实验:学生查阅资料,小组内探究解决问题方案,分工协作完成系统的分析与设计。
3)教师答疑:在学生课下实验过程中,教师安排灵活的答疑方式,如线下面对面、微信、课程平台等对学生进行答疑指导。
4)答辩验收:学生以PPT形式展示系统分析设计过程及结果,教师针对设计中涉及到的原 理、实验结果分析等方面向小组中的每个学生提出问题。应着重从学生分析解决问题的思路、物理概念和工程概念的理解、理论与实际的结合以及汇报的逻辑性、完整性等方面进行提问。
5)报告批改:学生在答辩后可结合教师的提问和意见对报告进行修改,教师从规范性、逻辑性、完整性等方面对报告进行评价。
在整个实验教学过程中,应在以下几个方面加强对学生的引导:
1) 课程中讲解的连续时间信号的复频域知识,在该系统中如何应用?
2) 如何应用课程中讲解的连续时间系统的复频域稳定性、系统响应等知识,对该系统进行分析和设计?
3) 体会理论分析与工程实际的区别和联系。
实验原理及方案
一、背景知识
磁盘能够有效地储存信息,而磁盘驱动器是对磁盘进行信息读取和写入操作的装置,其结构如图2所示。磁盘上不同的同心圆环所构成的各条磁道中保存着数据,在读写过程中,磁盘驱动器需要将安装在读取臂上的磁头准确定位到目标磁道上方,以便顺利保存或读取信息。读取臂的旋转由执行电机来驱动完成。

图2 磁盘驱动器结构示意图
磁盘驱动器磁头控制系统的框图可由图1表示。系统的输入为读取臂和磁头预期转过的角度X(s),对应的时域表示为x(t),也就是需要进行信息读写的磁道位置;系统输出为读取臂及磁头实际转过的角度θ(s),时域表示为θ(t),对应磁盘上磁道的位置。偏差信号E(s)=X(s)−θ(s)为磁头预期位置和传感器检测到的磁头实际位置的差值;控制器G
c(s)的作用是控制执行电机动作以使读取臂上磁头的实际位置θ(s)达到预期磁头位置X(s);位于反馈回路中的传感器用于检测磁头位置。一个准确、快速、稳定的磁头控制系统是高性能磁盘驱动器的基本保证。为评价磁头控制系统的性能,需从稳态性能和动态性能两方面进行。当读取臂上的磁头要从当前磁道转换到另一磁道时,磁头控制系统的输入信号近似为单位阶跃信号,系统的输出即单位阶跃响应,如图3所示。图中单位阶跃响应与预期位置x(t) = u(t)的差异即偏差信号e(t)。定义该系统的稳态误差*e
ss*为
 ,
,
即在时间t趋于无穷大时系统偏差信号e(t)的数值。如果该系统的e
ss为0,则说明磁头最终能够稳定在预期位置x(t),式中θ(∞)也称为磁头实际位置的稳态值。磁头实际位置θ(t)超过其稳态值θ(∞)的第一个最大峰值与稳态值的差值百分比,称为超调量∆,
 。
。
与之相对应,磁头实际位置θ(t)第一次到达峰值所需要的时间*tp*为峰值时间。
磁头控制系统的目标是通过设计控制器G
c(s)使实际磁头位置θ(t)能够“快速平稳”地到达设定的预期位置x(t)。“快速”是指磁头位置θ(t)到达并保持在允许误差范围内的时间,称为调节时间ts(也称为寻道时间),要尽量短;“平稳”是指在调节时间ts之后,磁头位置θ(t)与稳态值间的差值控制在一定范围内,即图3所示的误差带要足够小。根据实际需要,该误差带一般取稳态值的±2%或±5%。
图3磁头控制系统单位阶跃响应曲线及相关参数示意图
二、实验原理及方案
实验涉及“信号与系统”课程中的知识点是连续时间信号与系统的复频域分析,具体包括:信号的拉氏变换、拉氏变换终值定理、系统函数、系统稳定性与系统极点分布的关系、系统单位阶跃响应的稳态性能与动态性能等。通过该实验,加深学生对相关知识点的理解和掌握,强化学生对理论知识及其数学概念、物理概念和工程概念联系的认知。
磁盘驱动器中的执行电机通常采用永磁直流电机,其原理结构示意图如图4所示:
图4磁头控制永磁直流电机原理结构示意图
图中V
a(s)为电枢(转子)输入电压,*Ra*为电枢电阻,*La*为电枢电感,Ia为电枢电流,Vb为电枢感应电压,θ (s)和ω (s)分别为电机旋转的角度和角速度,J和b分别为负载(读取臂)的转动惯量和摩擦系数。上述物理量在时域的关系如下:
式中,*Kb为电枢感应常数,可近似为Kb=*0。电机的输出扭矩为
式中,*Km*为与永磁体材料磁导率相关的电机系数。当电机扭矩全部作用于读取臂时,满足
对上述时域公式进行Laplace变换(零初始状态),可得


整理可得执行电机的系统函数为:
式中τ =L
a/Ra为电枢时间常数。G1(s)有1个极点、无零点,是一阶惯性系统,表明该系统的输出不能瞬时响应系统输入的变化,表现出惯性或滞后性,时间常数τ反映了惯性的大小,τ 越大,输出响应越慢,τ 的大小由系统本身的参数决定;增益*Km/Ra*反映了稳态时输出与输入的比值。读取臂的系统函数为:
式中τ
1=J /b为读取臂时间常数。G2(s)有2个极点、无零点,是一阶惯性环节和积分环节的组合,其中一阶惯性环节将电机扭矩转换为读取臂旋转的角速度,积分环节将角速度转换为角位移(角度),而读取臂响应电机扭矩的快慢由读取臂的转动惯量和摩擦系数决定。假设传感器能实现足够精确的位置检测,则其系统函数可近似表示为Q(s)=1,即传感器可看作无失真传输系统。
表1给出了磁盘驱动器系统的一些典型参数,代入G
1(s)、G2(s)可得
表1 磁盘驱动器磁头控制系统典型参数
| 参数 | 符号 | 典型值 | 单位 |
|---|---|---|---|
| 读取臂和磁头的转动惯量 | J | 1 | N∙m∙s^2^ / rad |
| 摩擦系数 | b | 20 | N∙m∙s / rad |
| 电枢电阻 | R |
1 | Ω |
| 电枢电感 | L |
1 | mH |
| 电机系数 | K |
5 | N∙m/A |
设G
c(s) = Kp,根据上述执行电机、读取臂和传感器的系统函数,可得图1所示磁头控制系统的系统函数为
系统稳定性:实际物理系统均为因果系统,因果系统的稳定性可由系统函数所有极点是否都在s左半平面确定。用MATLAB绘制系统的零极点分布图和根轨迹图,可知当K
p大于4080时,系统函数H(s)的两个共轭复根将位于s平面右半平面,系统不稳定。
图5 G
c(s) = *Kp*时的系统根轨迹图系统偏差信号为
,
输入信号为单位阶跃信号X(s)=1/s时,利用拉氏变换终值定理,得该系统稳定时的稳态误差为
即当*Kp的取值使得系统稳定时,系统的稳态误差均为0,与Kp*大小无关。
输入信号为单位阶跃信号X(s)=1/s时,利用MATLAB绘制磁头控制系统的单位阶跃响应曲线,并可计算超调量∆、磁头寻道时间*t
s等动态性能指标,如图6所示。可知当Kp增大时,系统稳态误差始终为零,磁头寻道时间ts*变快,但超调量∆也随之增大。
图6 *K
p*取不同值时的单位阶跃响应曲线G
c(s)为PD控制器时,Gc(s) = Kd(s +Td),选择不同的参数Kd和Td,可得相应的系统阶跃响应曲线,如图7所示。分析可知,*Kd*不变,*Td*增大时,系统超调量增加;*Kd*增大,*Td*不变时,系统寻道时间减小。可根据给定的性能指标要求,选择合适的控制器参数。
图7 K
d、*Td*取不同值时的单位阶跃响应曲线



实验报告要求
实验报告需要包含以下内容:
-
实验原理分析;
-
编写实现实验内容的MATLAB仿真程序,画出程序运行结果图;
-
结合实验原理,对程序运行结果进行分析和讨论,如参数选取及性能比较;
-
实验中遇到的问题及解决方案;
-
主要参考文献。
考核要求与方法(限300字)
本实验成绩由系统分析与设计、实验报告、答辩三个环节构成。
-
系统分析和设计环节要求学生以小组为单位完成分析和设计任务,通过原理分析、査阅资料、MATLAB仿真、小组讨论等环节,共同完成磁头控制系统在复频域的建模与分析。此部分培养学生解决工程问题的能力,占总成绩的50%。
-
教师从规范性、逻辑性、完整性等方面对实验报告进行评价。此部分培养学生撰写科技实验报告的能力,占总成绩的25%。
-
答辩包括学生汇报讲解与教师提问两个部分,学生以PPT形式介绍系统的原理和方案,教师针对设计中涉及到的原理、实验结果分析等方面向小组中的每个学生提出问题,并给予评价。此部分培养学生的表达能力,占总成绩的25%。
项目特色或创新(可空缺,限150字)
-
明确的工程背景:能让学生将课堂上抽象的理论与实际的物理系统联系起来,复频域建模及分析体现了理论联系实际的工程理念。
-
知识的综合性:实验涵盖拉普拉斯变换、终值定理、系统稳定性、系统稳态性能及动态性能等内容。
-
方法的拓展性:学生可查阅资料,综合利用信号与系统、自动控制原理等相关理论和方法分析系统动态和稳态性能。