雷达测距系统时域分析

实验题目:雷达测距系统的时域分析
1. 课程信息
课程名称:信号与系统
课程体系/类别:专业类/专业核心课
课程性质:必修
学时/学分:48学时/3学分
适用专业:通信工程、信息工程、电子科学与技术、自动化、轨道交通信号与控制等
学生年级:大二上学期
2. 实验内容与任务(限500字)
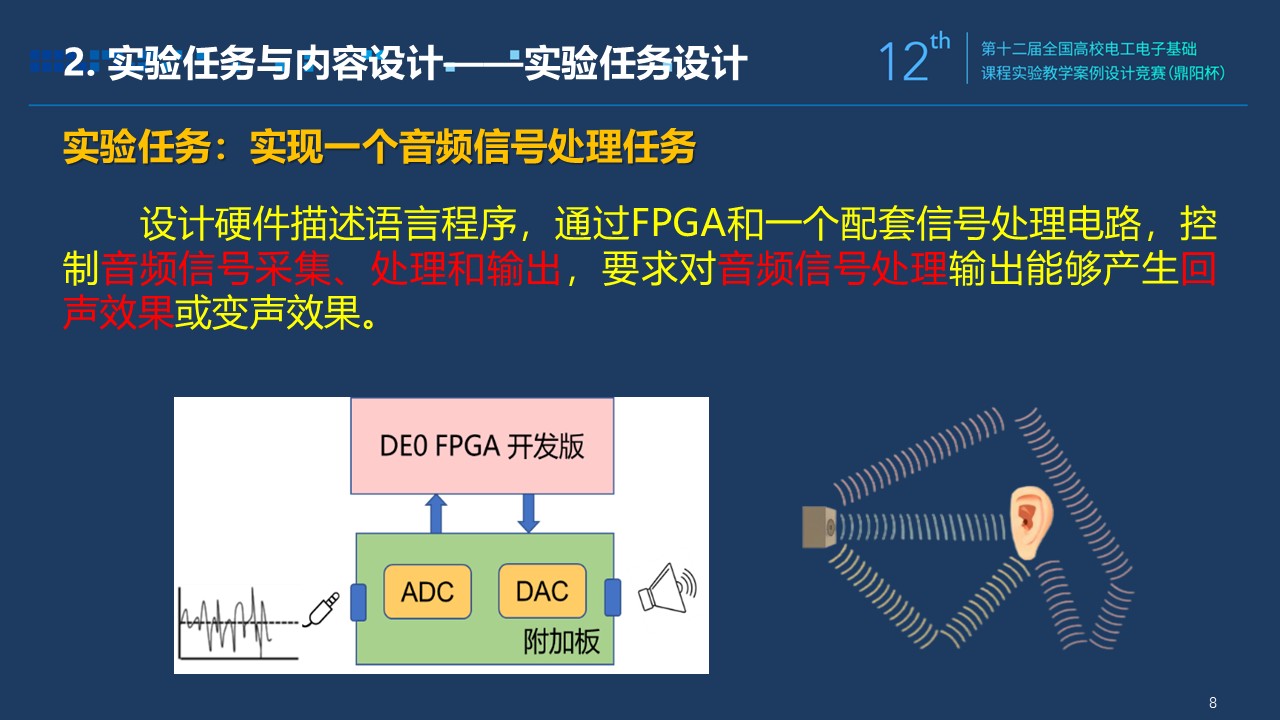
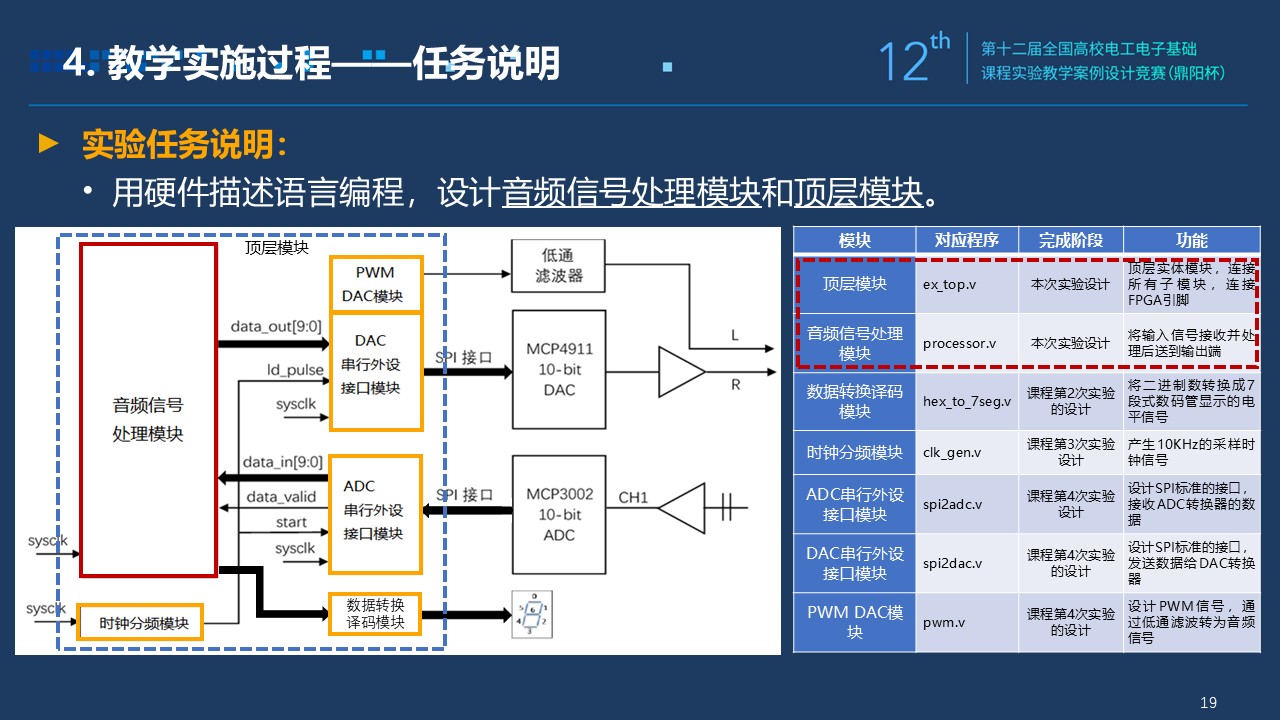
如图1所示,雷达测距系统可以建模为两个子系统的级联:短时射频脉冲信号x(t)由雷达发出并经目标反射后回到雷达系统的过程可视为传播子系统h1(t);识别反射信号r(t)中是否存在发射信号并标记其位置的过程可视为接收子系统h2(t)。本实验要求学生应用信号与系统时域分析方法完成以下内容:
图1 雷达测距系统基本原理图
1. 基础部分(60分)
(1)
使用MATLAB产生图2中x1(t),x2(t)与z(t)三个矩形信号,并分别计算x1(t),x2(t)与z(t)的卷积。观察卷积结果并据此分析雷达测距系统的测量原理。(提示:注意观察卷积结果最大值位置。)
(2)
理论推导证明 在
在 处取最大值。
处取最大值。
x1(t) x2(t) z(t)
图2 x1(t),x2(t)与z(t)的波形图
2. 提高部分(20分)
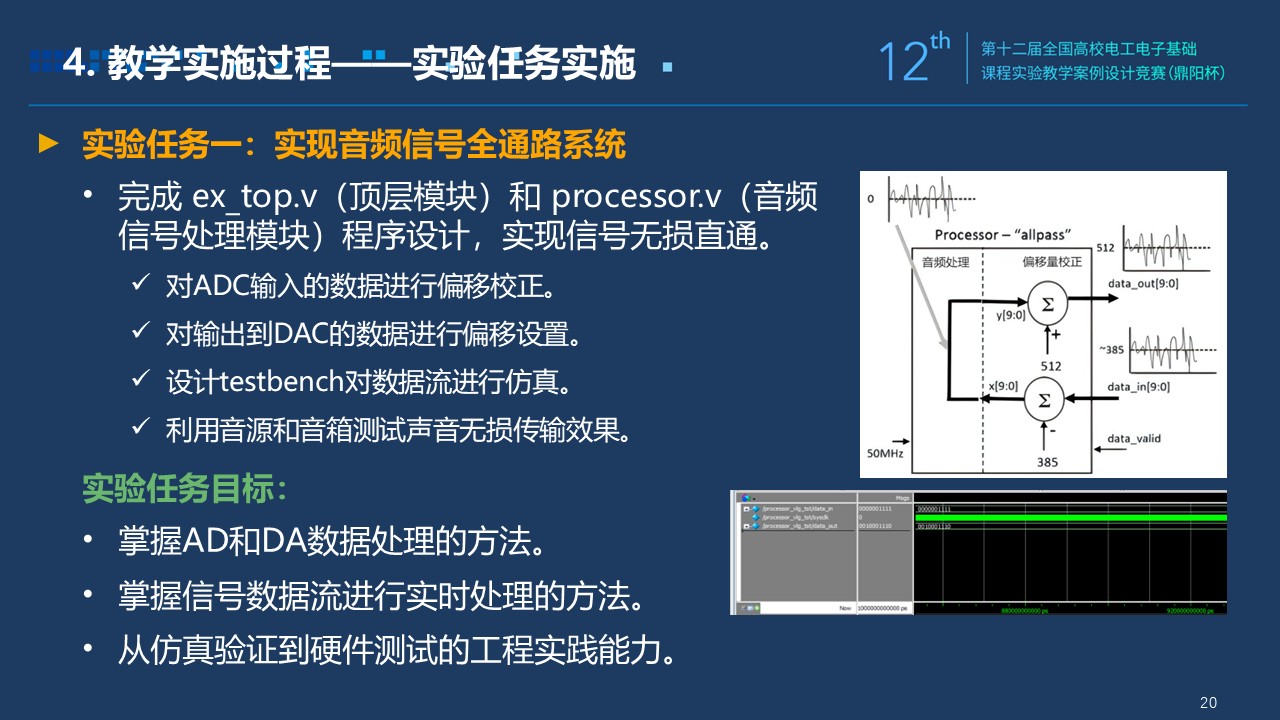
雷达信号测距仿真:某雷达发射信号x(t)包含一个频率为4MHz,相位为0,持续时间为2×10^-6^秒的正弦脉冲。利用MATLAB读取含雷达返回信号和采样率的数据文件object1.mat”,画出发射信号x(t),返回信号r(t),接收系统冲激响应h2(t) = x(−t)及输出信号y(t)的波形,参考基础部分结论计算目标与雷达的距离。
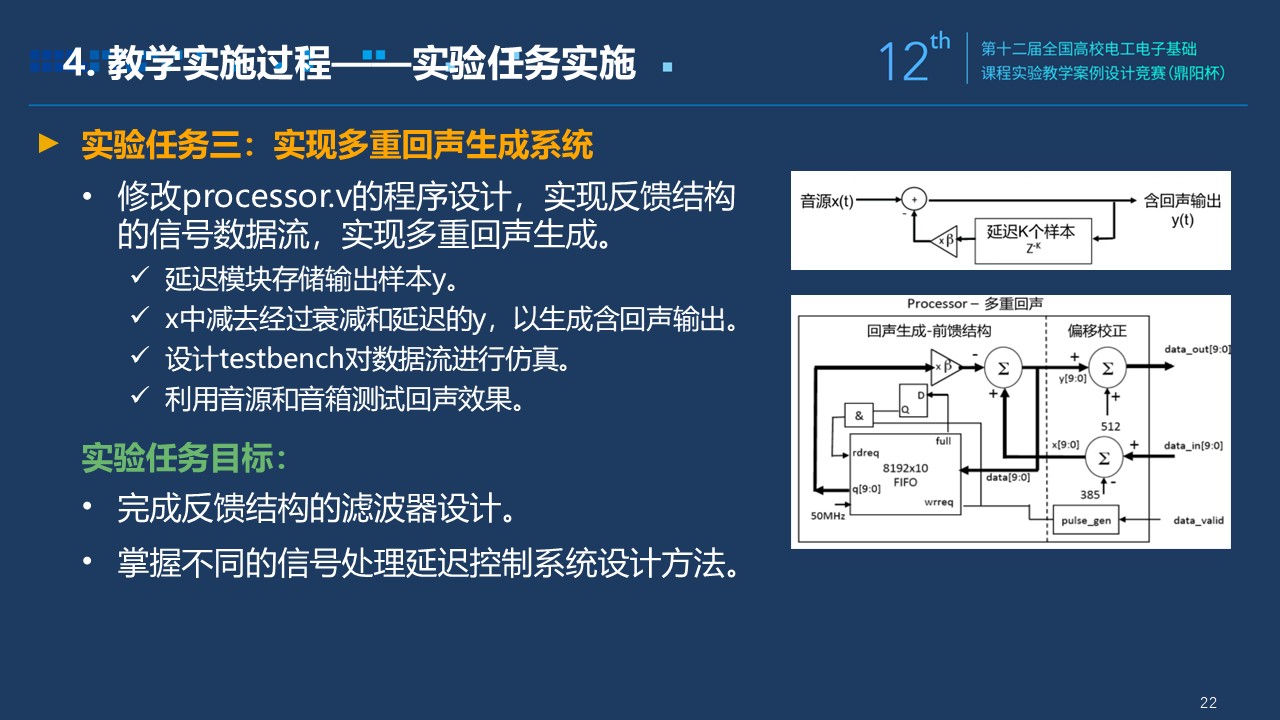
3. 扩展部分(20分)
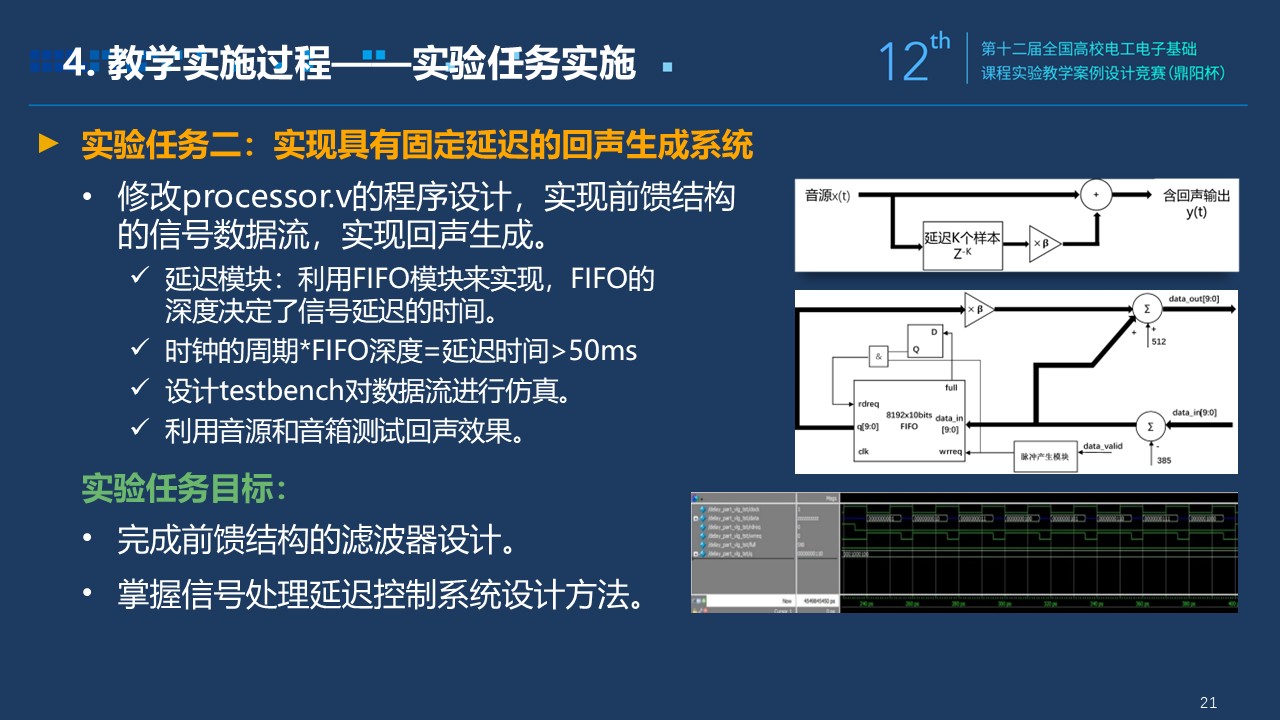
测距系统抗噪分析:雷达信号在传播过程中可能受到加性白噪声的影响。设雷达发射信号同上。利用MATLAB分别读取信噪比SNR为0dB,-15dB和-30dB的雷达返回信号echo1.mat, echo2.mat及echo3.mat, 画出各次测量中返回信号r(t)及输出信号y(t)的波形。讨论测距方法对抗噪声的性能。
3. 实验过程及要求(限300字)
学生以三人小组为单位,需要依次完成理论分析、模拟仿真、结果分析、交流答辩及报告撰写。
-
理论分析部分包括背景知识的了解、相关文献的调研和数学模型的分析建立等;
-
模拟仿真部分需要采用MATLAB进行代码的编写,通过实验仿真验证理论分析的正确性;
-
结果分析部分需要总结实验的结果,讨论雷达测距的基本原理、测距方法对于噪声的鲁棒性等;
-
交流答辩环节要求学生进行课堂演讲答辩,讲解分析过程和实验结果,教师通过质疑等方式对各组的实验内容提出建议和意见。
-
实验报告以科技论文的形式进行呈现,根据统一的模板对实验过程进行总结和提炼,避免简单堆砌程序代码或者实验结果。
4. 相关知识及背景(限150字)
(1) 反射测距:电磁波在空气中的传播速度基本恒定,因此,根据电磁波遇到障碍物后反射信号的延时时间可计算障碍物距离。
(2) 匹配滤波器:匹配滤波器采用发射信号时间反转作冲激响应,返回信号经线性卷积在滤波器输出端的最大值即对应延时时间。
(3) 雷达信号:为确保雷达测距系统的测量范围和精度,雷达发射信号通常为高频电磁波。
5. 教学设计与引导
实验教学方式的构建使学习的过程充满探索与创新的机会。实验教学过程尤其是引导与讨论的有效性组织是实验教学过程的难点。
(1) 时间组织:本实验与信号与系统的时域分析对应,所以安排在信号与系统时域分析章节内容完成教学时发放研究性教学安排。
(2) 人员组织:区别于传统课堂教学形式,实验教学采用2-3人小组进行,按照课上自由组合分组情况组织实施,便于学生团队协作能力的提升。
(3) 过程组织:利用网络教学平台实现整个教学过程的组织,利用平台发放题目、交流讨论、提交报告等,一般给定学生2周以内的时间完成整个题目的研究,过程中教师应起到激发学生思考、设计、总结与交流的作用,做一名学生学习的促进者和辅导者。
(4) 评价组织:在学生完成整个实验过程后,教师考察整个过程的参与、完成情况对学生给出系统、客观的评价。
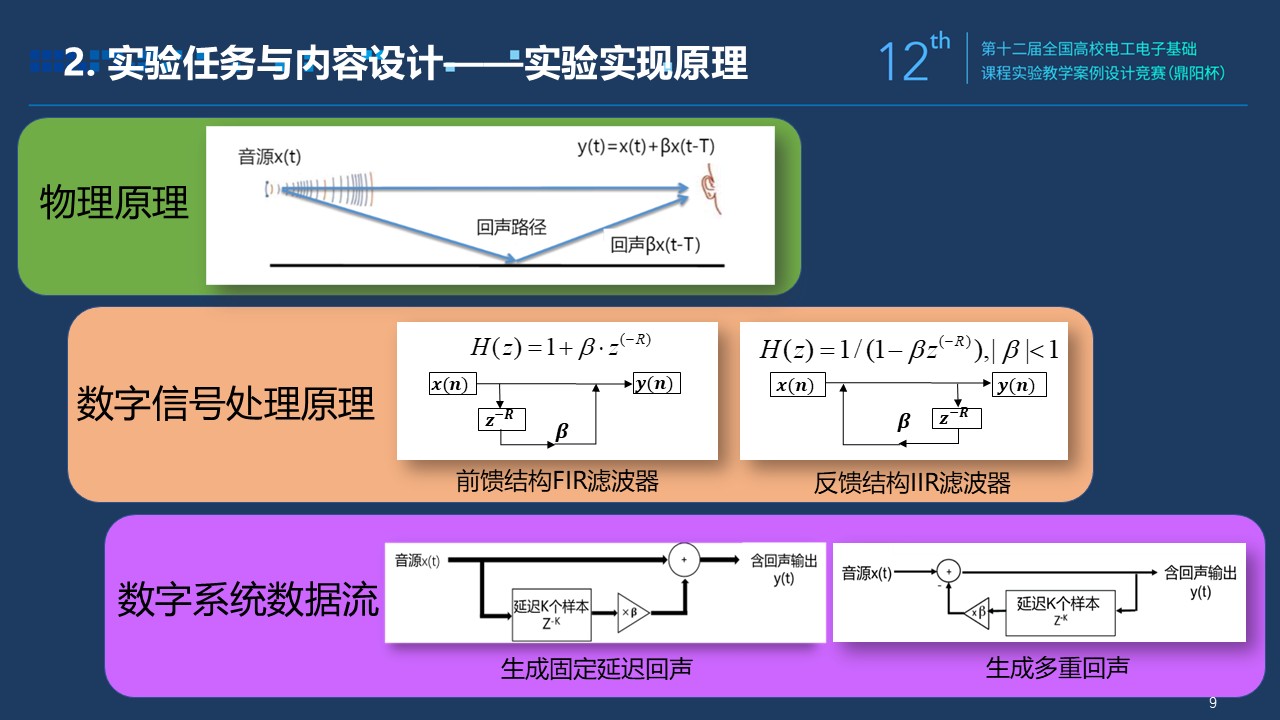
6. 实验原理及方案
(1) 雷达反射测距基本原理
雷达是其英文RADAR的音译,意思是无线电探测和测距(RAdio Detection And
Ranging)。雷达利用反射信号进行测距,所依赖的基本物理原理是电磁波的两种属性,一是电磁波遇到障碍物时会发生反射现象,二是电磁波在空气中的传播速度基本保持恒定。如图3所示,雷达发射的短时射频脉冲信号x(t)经目标物体反射后,反向传播至雷达,被雷达接收后形成接收信号r(t)。在理想情况下,雷达发射的信号x(t)在传播过程中主要经历幅度衰减和延时。设衰减因子为α,0<α<1,延时为 ,
, ,忽略其他射频信号源与噪声的影响,则返回信号可以表示为
,忽略其他射频信号源与噪声的影响,则返回信号可以表示为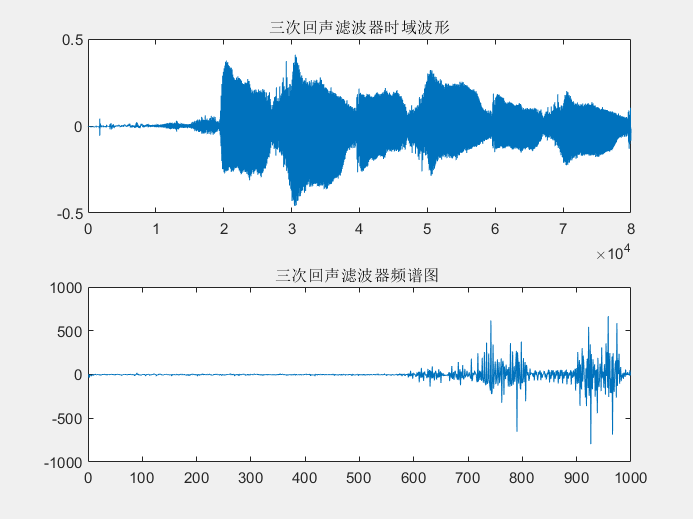 。假设目标物体与雷达间的距离为d,则距离d与返回时间τ之间的关系为
。假设目标物体与雷达间的距离为d,则距离d与返回时间τ之间的关系为
 (1)
(1)
其中,c为空气中的光速,在上述过程中保持恒定。由式(1)可知,目标物体与雷达之间的距离与发射信号往返两者间路程的耗时成正比,比例因子为空气中光速的一半。这样,距离测量的问题即可转换为返回信号的检测与延时测量问题。
图3 雷达反射测距原理图
(2) 匹配滤波器工作原理
在实际应用中,由于存在其他射频信号源和噪声,雷达接收到的反射信号不仅仅包含经反射后的短时射频脉冲信号,往往也包含了各种干扰信号和噪声。因此,直接从返回信号中进行反射信号的延时测量几乎是不可能的。匹配滤波器使用发射信号的时间反转,即x(-t),作为接收子系统单位冲激响应。返回信号r(t)经线性卷积后,在滤波器输出端的最大值位置即对应反射信号的延时时间。该信号接收方法可以较好地对抗雷达信号传播过程中的噪声干扰,进行反射信号位置的检测,从而完成雷达反射测距的功能。
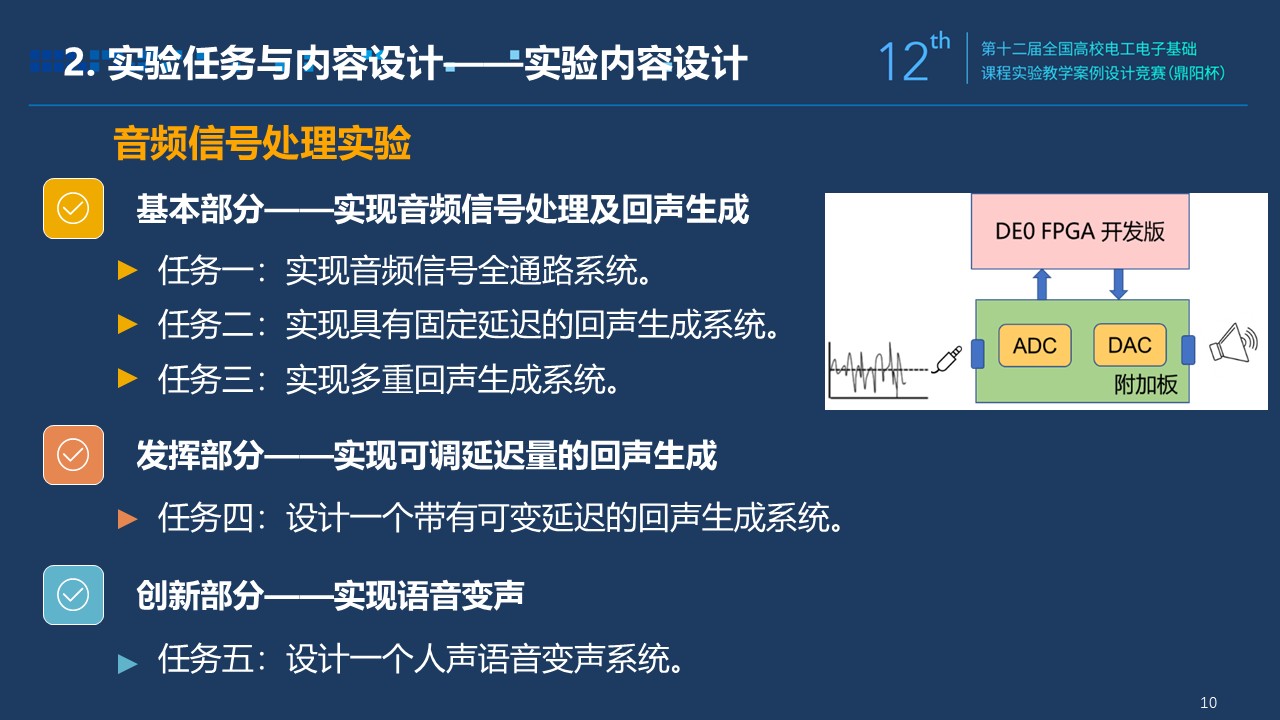
(3) 实验方案设计
如图4所示,为使学生更好地利用信号与系统时域分析知识,理解使用匹配滤波器进行雷达反射测距的工作原理,实验方案设计采用探索-分析-验证-拓展的路线,逐步深入引导学生展开研究。
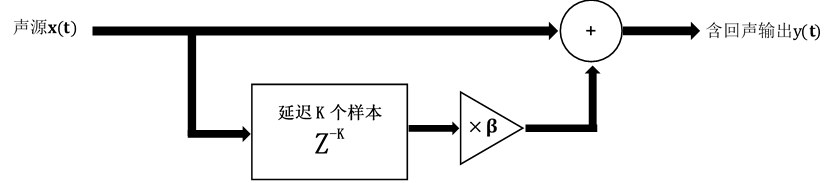
图 4 实验方案设计路线
- 探索阶段:基本信号卷积计算,探索匹配滤波器工作依据
在探索阶段,我们使用基本信号引导学生进行匹配滤波器工作原理的探索。首先,在
MATLAB
中使用rectpuls函数生成如图5左所示的几种矩形脉冲信号,x1(t),x2(t)与z(t)。其中,x1(t),x2(t)模拟带有延时的反射信号,z(t)则模拟匹配滤波器单位冲激响应。接着,使用卷积conv函数分别计算x1(t),x2(t)与z(t)的卷积,得到卷积结果如图5右所示。最后,引导学生观察卷积结果中的最大值所在位置与x1(t),x2(t)
延时的关系。可以看到,卷积结果的最大值位置正好反映了矩形脉冲的位置。
通过基本信号的卷积计算,结合课堂所学信号与系统时域分析方法,学生可以初步获得匹配滤波器工作依据:返回信号经过以发射信号时间反转作为冲激响应的匹配滤波器时,输出结果为返回信号与冲激响应的卷积。卷积结果的最大值位置反映了返回信号的延时,进而可以利用反射测距原理实现雷达测距的目的。
图5
左:信号x1(t),x2(t)与z(t)的波形图,右:x1(t),x2(t)与z(t)的卷积结果图。
- 分析阶段:数学工具推导证明,分析匹配滤波器工作机理
在分析阶段,引导学生使用数学工具进行匹配滤波器工作机理的分析,证明在处取最大值。其中, 模拟带有延时的反射信号,
模拟带有延时的反射信号, 则模拟匹配滤波器单位冲激响应。根据信号与系统时域分析方法,匹配滤波器的输出即。具体证明过程如下:
则模拟匹配滤波器单位冲激响应。根据信号与系统时域分析方法,匹配滤波器的输出即。具体证明过程如下:
首先,根据卷积的定义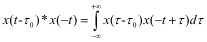 。当
。当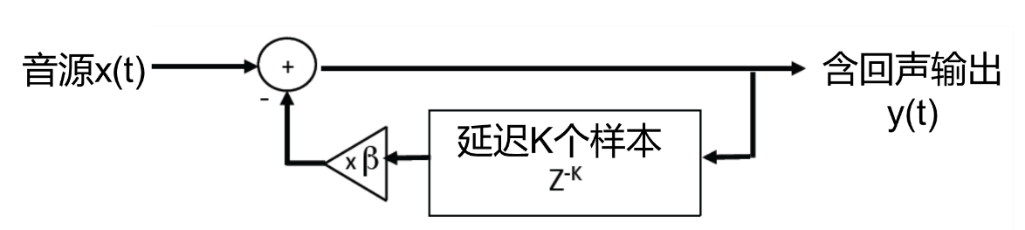 时,上述卷积结果值为
时,上述卷积结果值为 ;当
;当 时,卷积结果值为
时,卷积结果值为 。为了比较
。为了比较 与时卷积结果值的大小,我们只需要证明
与时卷积结果值的大小,我们只需要证明 即可。
即可。
由于 ,且
,且 ,对
,对 进行展开即可得证:
进行展开即可得证:
= 即
即
综上可得,在时卷积结果值最大。
通过数学推导证明,学生可以更深入地理解探索阶段所得的匹配滤波器工作原理:因为在在时卷积结果值最大,所以检测匹配滤波器输出的最大值位置,即可获得返回信号的延时,实现雷达测距功能。值得注意的是,证明过程并未对 的类型做出要求,因此,以上结论不仅限于探索阶段的基本矩形信号,对于其他类型的信号也是满足的。此外,在具体教学实施过程中,可以适当给出部分提示,引导学生完成数学的证明过程。
的类型做出要求,因此,以上结论不仅限于探索阶段的基本矩形信号,对于其他类型的信号也是满足的。此外,在具体教学实施过程中,可以适当给出部分提示,引导学生完成数学的证明过程。
- 验证阶段:雷达信号仿真测试,验证匹配滤波器测距原理
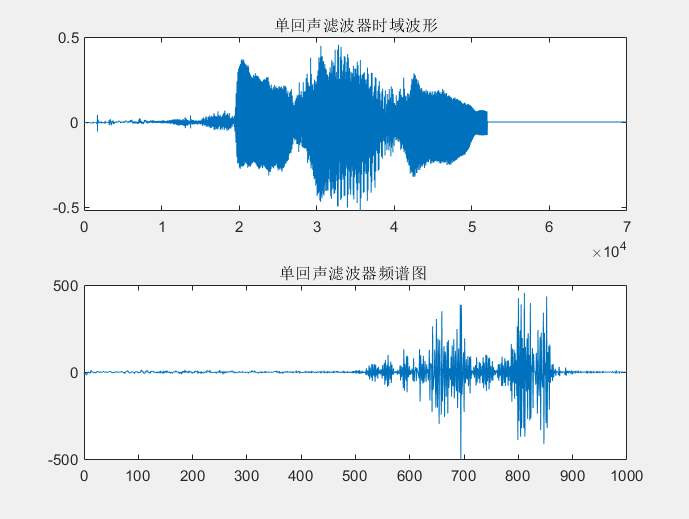
实际测量中,为确保雷达测距系统的测量范围和精度,雷达发射信号通常为高频电磁波。因此,在验证阶段,我们使用更接近实际雷达信号的高频短时脉冲信号进行测距实验,验证匹配滤波器测距原理。设某次雷达发射的信号x(t)包含一个频率为4MHz,相位为0,持续时间为2×10^-6^秒的正弦脉冲。利用MATLAB读取包含有经某目标物体反射后返回的雷达信号及采样率的数据文件object1.mat,可以画出本次测量中发射信号x(t),返回信号r(t),接收子系统单位冲激响应h2(t) = x(−t)及输出端信号y(t)的波形。根据信号与系统时域分析方法,输出端信号y(t)可以由返回信号r(t)与x(−t)的卷积计算获得,即y(t)=r(t)*x(−t)。图6为MATLAB画出的各信号时域波形。利用之前获得的匹配器工作原理,通过y(t)中最大值的位置及时间分辨率,可以计算返回信号的延时,进而获得最终测量距离。在图6所示测量中,计算获得延时为delay=1.0220e-4秒,根据,可以计算得到目标距离为15330m。
基于高频短时脉冲信号的仿真实验,可以进一步验证前期所得匹配滤波器测距原理:在使用高频电磁波进行测距分析时,仍然可以利用在时卷积结果值最大的结论,使用匹配滤波器进行返回信号的检测和定位。
图6
发射信号 x(t)、返回信号 r(t)、匹配滤波器单位冲激响应h2(t) = x(−t)及输出端信号y(t)波形。
- 拓展阶段:加噪信号测距分析,搭建知行桥梁, 激活求知欲望
由于存在其他射频信号源和噪声,雷达接收到的反射信号往往受到各种干扰信号和噪声的影响。为了进一步搭建理论知识与实际场景的桥梁,激励学生对难点问题的求知欲望,本实验在拓展阶段,通过仿真叠加不同程度加性白噪声的返回信号,要求学生进行基于匹配滤波器测距方法的抗噪性能分析。实验的操作流程与验证阶段相似:通过MATLAB读取包含有信噪比SNR为0dB,−15dB和−30dB的雷达返回信号(注:以dB为单位的信噪比 )。画出各次测量中返回信号r(t)及匹配滤波器对应输出端信号y(t)的波形,如图7所示。利用y(t)中最大值位置及时间分辨率,可以计算目标距离,分析匹配滤波器的抗噪性能。
)。画出各次测量中返回信号r(t)及匹配滤波器对应输出端信号y(t)的波形,如图7所示。利用y(t)中最大值位置及时间分辨率,可以计算目标距离,分析匹配滤波器的抗噪性能。
对比图7中不同信噪比下的返回信号,可以看到,随着信噪比的降低,返回信号中的噪声成分越来越大,在SNR=−15dB时,反射信号已经几乎淹没在噪声中,无法直接通过返回信号观察到反射信号的延时。从匹配滤波器的输出看,在SNR=−15dB时,虽然从返回信号已经难以识别反射信号的位置,但是,匹配滤波器输出的最大值位置仍然能够很好地检测到反射信号的延时,从而得到准确的测距结果15330m。当噪声继续增大,SNR=−30dB时,噪声的干扰使得匹配滤波器的峰值不再突出,测距结果为14205.00m,测量误差达到了约7.3%,受到明显的噪声影响。因此,使用匹配滤波器进行雷达返回信号的接收,可以一定程度上抵抗环境的噪声干扰。但是,当环境复杂,噪声过大时,仍然需要进一步探索更先进的信号处理算法和技术,提高雷达系统在复杂环境下的性能表现。
基于加噪信号的测距性能分析,不仅进一步验证了基于匹配滤波器的测距原理,而且缩小了理论知识与实际应用场景的距离。学生可以更好地认识实际中面临的问题,体会匹配滤波器在雷达测距中的作用。最后,通过一个“不完美”的实验结果,进一步激发学生的求知欲望,为学生打开一扇探索新世界的大门。
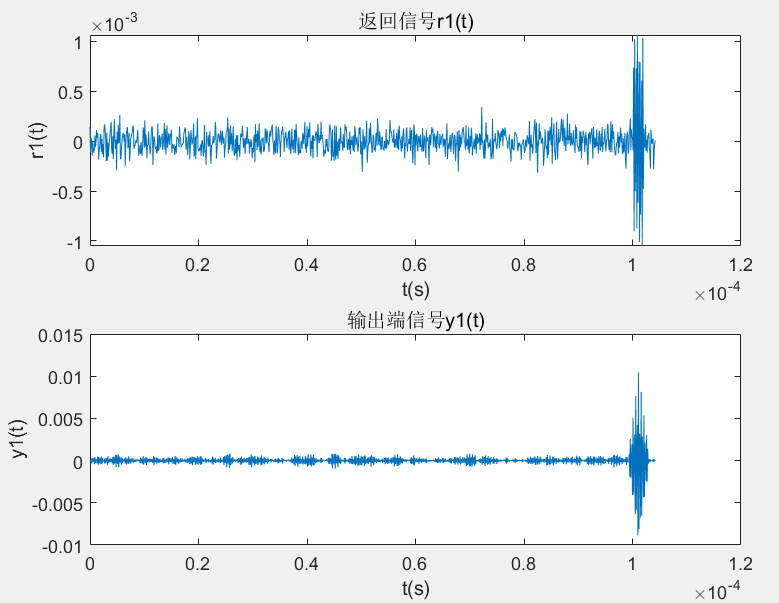
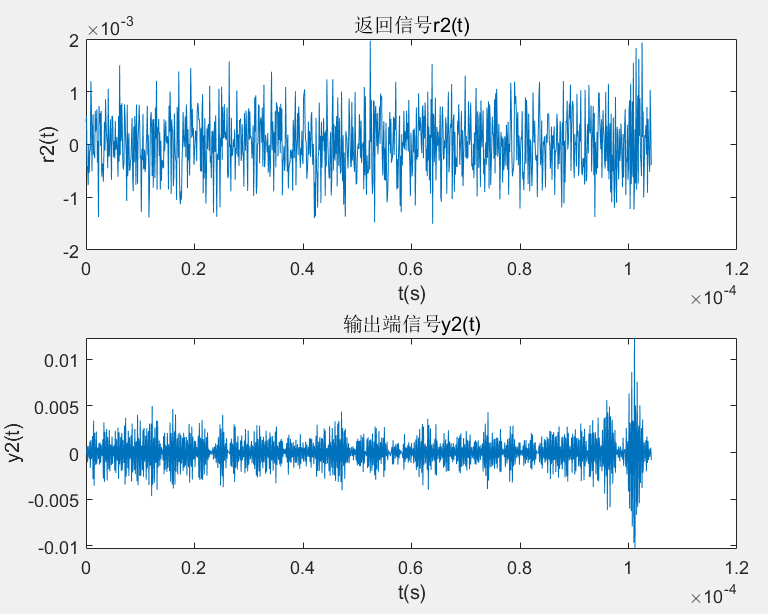
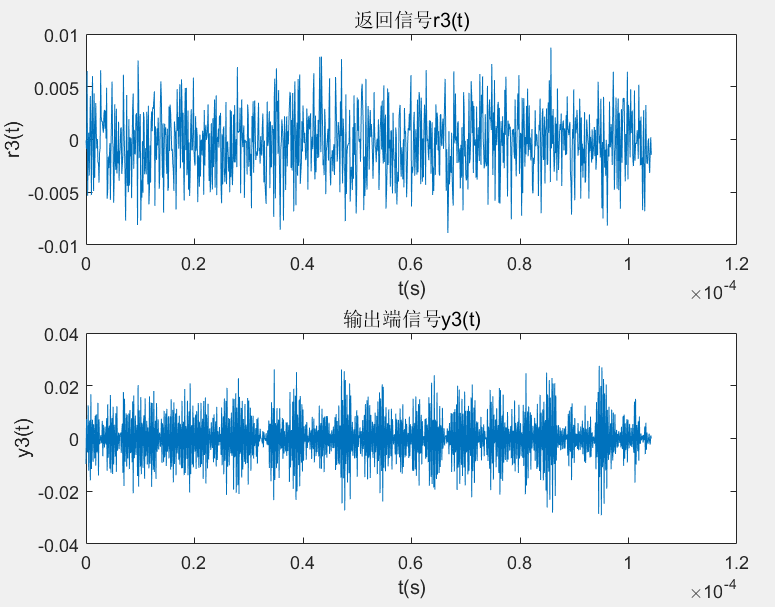
图7 从左到右依次为SNR=0,−15,和−30分贝的返回信号 r(t)及对应输出端信号y(t)波形。
7. 教学实施进程
(1) 课堂讲授:在“信号与系统”的时域分析章节,课堂讲解雷达反射测距和匹配滤波器的相关知识背景和实验内容,激发学生对该应用的兴趣,引导学生对该系统主要问题的思考;
(2) 实验开展:指导学生查阅相关资料,通过小组讨论探究解决问题的方案,并分工协作完成雷达测距系统实验内容的设计与实现;
(3) 教师答疑:采用网络教学平台回答学生的困惑和疑问;
(4) 答辩交流:通过课堂答辩的方式,学生以 ppt 的形式展示信号分析和处理方案,演示雷达系统测距结果,教师针对设计中涉及到的原理、实验结果分析等方面向小组中的学生提出问题。
(5) 报告评价:学生在答辩后可结合教师的提问和意见对报告进行修改,最终教师从正确性、逻辑性、完整性、规范性等方面对报告进行评价。
8. 实验报告要求
实验报告要求符合科技论文的写作规范,需要包含但不限于以下内容:
(1) 背景介绍:包括实验内容的应用背景和必要的专门知识;
(2) 方案设计:围绕实验要求,设计实验的整体方案,并对方案的原理和过程进行详细介绍;
(3) 结果分析:对实验结果进行总结,采用对比等方式尝试获得有效结论;
(4) 参考文献:列出实验过程中参考过的主要文献。
9. 考核要求与方法(限300字)
表1 研究性教学的成绩结果评价模块设计
| 评价模块 | 比例(%) | 说明 |
|---|---|---|
| 平时讨论 | 10% | 采用教学平台上的“答疑讨论”功能支撑学生实验过程中的交流讨论,根据每个学生的发帖、回帖讨论数量进行统计平时讨论评分。 |
| 实验报告 | 40% | 根据载体题目设计,制定统一的报告模板,划分为题目分析、仿真程序、仿真结果、结果分析、自主学习内容、阅读文献、发现问题和问题探究部分,分主次进行各个部分的评分。 |
| 课堂交流 | 30% | 要求学生按组制作PPT并上台进行答辩,分为两个部分成果展示与问题答辩,并由小组成员共同完成,根据各自的答辩表现给出不同的答辩评分。 |
| 同级评价 | 20% | 答辩过程中组建同级评分小组,对每一组学生的成果展示与问题答辩情况进行同级评分。 |
10. 项目特色或创新(限150字)
(1) 工程性:题目设计提炼于科研实践,有效拓宽学生的学术视野;
(2) 科学性:由探索-分析-验证-拓展的路径逐步展开,符合科研思维;
(3) 探索性:开放性的实验结果,激发学生的求知欲和科学探索精神;
(4) 知识性:聚焦信号与系统时域分析模块,覆盖信号时域表示与系统时域描述关键知识点。
11. 项目实施佐证
(1) 答辩交流现场

(2) 实验报告截图