
中小型水域水面清洁机器人设计
课程名称:电子技术(模拟电子技术、数字电子技术)
实验题目:中小型水域水面清洁机器人设计
课程简要信息
课程名称:竞赛型创新实验设计
课程学时:3-4周
适用专业:机械、自动化
学生年级:本科二年级
实验内容与任务(限500字)
项目需要完成的任务(如需要观察的现象,分析某种现象的成因、需要解决的问题等);是否设计有不同层次的任务。
-
以中小型水域水面清洁机器人为对象,设计制作一个具有遥控/自主巡航功能的水面清洁机器人,基本功能是在水面、前进、后退、转弯、收集水面漂浮物、跟踪漂浮物功能控制;
-
扩展功能:运用手机APP或设计专用遥控器,对水面机器人的运动方式进行控制;
-
扩展功能:实现机器人图像采集、传输及目标跟踪;
-
扩展功能:设计机器人的避障系统,在不同环境下可以使用避障传感器躲避障碍;
-
扩展功能:运用GPS定位模块实现水下机器人的定位;
-
扩展功能:利用水面机器人检测系统传感器获取水质、水温等数据,实现无线数据传输功能;
-
扩展功能:设计并实现机器人故障状态下的控制方式及返航功能。
-
扩展功能:设计并实现太阳能充电功能。
实验过程及要求(限300字)
如对学生在实验过程中在需求分析、资料查询、自学预习、思考讨论、方法设计、进程规划、软件仿真、平台构建、器件选择、表格设计、现象观察、数据测试、问题分析、总结报告、验收答辩、演讲交流等各方面的要求。
-
学习了解查阅、阅读相关科技文献的方法;
-
了解水面机器人的机械结构、电源模块、控制电路、驱动电路、通信与信号系统等设计过程,通信协议选择;
-
设计水面机器人遥控器硬件电路、完成必要的功能测试方法;
-
选择符合要求的STM32F407作为控制芯片,了解该芯片的I/O特性,实现水面机器人的全部功能;
-
构思水面机器人跟踪系统分析、建模、电路设计及控制方式;
-
设计水面机器人姿态反馈(如:遇风浪情况)控制电路,实现水面机器人在水中保持正确的姿态;
-
选择水面机器人的图像处理模块型号,实现水面机器人采集图像实时传输;
-
构建一个水面机器人对漂浮物跟踪的数学模型,通过理论分析水面机器人运行模式及控制方法;
-
撰写设计总结报告,并通过分组演讲,学习交流不同解决方案的特点。
相关知识及背景(限150字)
项目涉及的知识方法、实践技能、应用背景、工程案例。
这是一个运用数字和模拟电子技术、嵌入式系统、无线通信技术解决现实生活和工程实际问题的竞赛型案例,控制电路需要运用传感器及检测技术、信号放大、模数信号转换、数据显示。嵌入式系统需要C语言程序设计、计算方法、数据结构等技术。机械结构需要机械结构设计、防水处理及相关国家、国际标准等工程概念与方法。
教学目标与目的(限100字)
如学习、运用知识、技术、方法;培养、提升能力、素质。
在较为完整的工程项目实现过程中引导学生了解机械设计、加工、装配方法、传感器技术、嵌入式系统,根据工程需求实现多种功能分别选择不同的技术方案;引导学生根据水面机器人的功能需要设计电路、选择元器件,构建测试环境与条件,并通过测试与分析对项目作出技术评价。
教学设计与引导
如预习要求及检查;课堂知识讲解、方法引导、背景解释;实验中的方法指导,问题设置、思路引导等。研讨主题、观察节点、验收重点、质询问题的设计等。
本实验的过程是一个比较完整的工程实践工程,需要经历学习研究、方案论证、系统设计、实现调试、测试标定、设计总结等过程。在实验教学中,应在以下几个方面加强对学生的引导:
-
学习相关科技文献的检索与阅读方法,了解申报国家专利的相关知识和方法。
-
了解机械设计、机械加工工艺、机械装配方法。
-
了解嵌入式系统的基本功能、实现扩展功能的合理应用方法。
-
运用掌握的相关知识设计系统电路,包括主电路、电源电路、驱动等电路设计,根据不同的负载类型选择不同的设计方法。
-
了解电子陀螺仪的使用方法,通过硬件电路的反馈和软件编程实现水面机器人的姿态控制。
-
在完成水面机器人基本功能的基础上,通过研究讨论,拓展更多的附加功能,了解STM32F407系统扩展模块的硬件电路设计和软件编程方法。
-
本教学案例实验要求精度并不高,主要是使水面机器人在水中完成设计动做要求。
-
在水面机器人的姿态控制调试过程中,简略地介绍反馈控制的基本原理,要求学生自学实现反馈控制的方法及参数的整定。
-
在电路设计、搭建、调试完成后,需要根据实验室所能够提供的条件,设计测试方法,搭建较为稳定的测试环境。
10)在实验完成后,组织学生以不同的电路模块演讲、答辩、评讲的形式进行交流,了解不同解决方案及其特点,拓宽知识面。
在设计中,要注意学生设计的规范性;如系统结构与模块构成,模块间接口方式与参数要求;在调试中,要注意工作电源、参考电源品质对系统指标的影响,电路工作的稳定性与可靠性;在测试分析中,要分析系统的误差来源并加以验证。
实验原理及方案
实验的基本原理、完成实验任务的思路方法,可能采用的方法、技术、电路、器件。
- 控制系统结构
图1 水面机器人控制系统框图
- 结构设计方案

图2 第一代水面清洁机器人外形图 图3 第一代水面清洁机器人遥控器
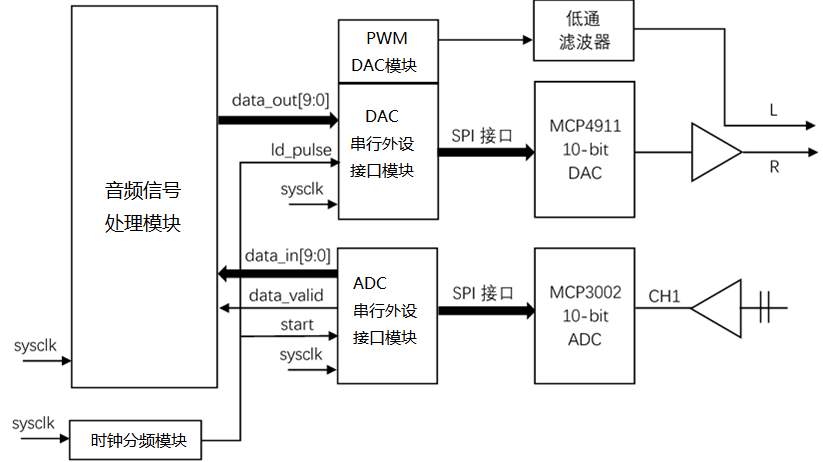
图4 第二代水面清洁机器人模型图 图5 第二代水面清洁机器人爆炸图
图6 第二代水面清洁机器人传动部分爆炸图 图7 第二代水面机器人驱动部分爆炸图
图8 手机APP控制界面
图9 自制遥控器结构
- 故障状态返航实现方案
图10 水面机器人故障状态返航系统框图
- 水下机器人系统实现方案
图11 水面机器人控制系统流程图
- 运用方法
首先确定设计题目、实现基本功能、扩展功能、评分标准、讨论答辩环节;
理论模型建立、分析、控制芯片选择;
运用电路、模拟电子技术、数字电子技术、单片机原理、嵌入式系统等;
制作水下机器人结构、设计控制电路、选择电子元器件;
功能调试、参数调试、水下调试;
实验总结、撰写报告、讨论答辩。
- 部分电路如下:
图12 电源充电模块
图13 稳压电路
图14 转接板部分电路
系统参数如下:


| 性 能 | ||
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
教学实施进程
简要介绍实验实施进程的各个环节(如任务安排、预习自学、现场教学、分组研讨、现场操作、结果验收、总结演讲、报告批改等)中,教学设计的思路、目的,教师、学生各自需要完成的工作任务,需要关注的重点与细节。
运用电子技术、单片机、嵌入式系统相关知识设计具有工程实践的典型案例,了解相关科技文献检索、阅读能力;自学嵌入式系统、机械加工及装配工艺、专利申请等知识;作品制作过程中,针对涉及的知识节点进行讨论研究、改进;通过实物功能、参数检测队作品给予评价验收,并进行演讲答辩。
实验设计思路、目的:开拓学生的知识领域,利用学生感兴趣的具体实物,使学生主动思考、提出问题、开发功能。
实验报告要求
需要学生在实验报告中反映的工作(如:实验需求分析、实现方案论证、理论推导计算、设计仿真分析、电路参数选择、实验过程设计、数据测量记录、数据处理分析、实验结果总结等等)
实验报告需要反映以下工作:
-
实验需求分析
-
实现方案论证
-
理论推导计算
-
电路设计与参数选择
-
电路测试方法
-
实验数据记录
-
数据处理分析
-
实验结果总结
考核要求与方法(限300字)
考核的节点、时间、标准及考核方法。
-
实物验收:水面机器人基本功能与性能指标的完成程度(如前进、后退、转弯、追踪漂浮物体),完成时间。
-
实验质量:结构设计、电路方案的合理性,焊接质量、组装工艺等。
-
自主创新:功能构思扩展、电路设计的创新性,自主思考与独立实践能力。
-
实验成本:是否充分利用实验室已有条件,材料与元器件选择合理性,成本核算与损耗。
-
实验数据:测试数据和测量误差。
-
实验报告:实验报告的规范性与完整性。
项目特色或创新(可空缺,限150字)
项目的特色在于:项目背景的工程性,知识应用的综合性,实现方法的多样性。
作品具有多种功能,可以代替人清理、检测、获取陌生水域的水质等级、水面情况等数据,还可以用于中小型水域的水质治理、水上游乐场所的水面搜寻、清洁。具有多种控制方式,可以适应许多不同环境,并且功耗低,成本低廉。
参赛选手信息表
| 案例提供单位 | 山东科技大学 | 相关专业 | 电子技术 | |||
|---|---|---|---|---|---|---|
| 设计者姓名 | 崔保春 | 电子邮箱 | cbc8222@163.com | |||
| 移动电话 | 15966811205 | 通讯地址 (含邮编) |
山东省青岛市黄岛区前湾港路579号山东科技大学电气与自动化工程学院 266590 | |||
| 设计者姓名 | 沈怡平 | 电子邮箱 | Ypshen03@163.com | |||
| 移动电话 | 15865598280 | 通讯地址 (含邮编) |
山东省青岛市黄岛区前湾港路579号山东科技大学电气与自动化工程学院 266590 | |||
| 设计者姓名 | 袁方 | 电子邮箱 | Yf210yf@163.com | |||
| 移动电话 | 17685851560 | 通讯地址 (含邮编) |
山东省青岛市黄岛区前湾港路579号山东科技大学电气与自动化工程学院 266590 | |||
| 相关x课程名称 | 电路、模电、数电、单片机、嵌入式系统 | 学生年级 | 本科二年级 | 学时(课内+课外) | 16+32 | |
支撑 条件 |
仪器设备 | 3D打印机、示波器、万用表、直流电源、焊接工具、装配工具等 | ||||
| 软件工具 | Protel、keil、Proteus、solidworks等 | |||||
| 主要器件 | Pcb万用板、电子元器件等 | |||||