
基于CDIO功能可重构的智能小车设计与制作
实验题目:基于 CDIO 功能可重构的智能小车设计与制作
1. 课程简要信息
实验课程名称:电子系统综合课程设计实验学时安排(课内 $^ +$ 课外):3周(1 周 $^ { + 2 }$ 周)
学生专业、年级:机械电子工程,机械制造及其自动化,电气工程及其自动化、三年级学生
2. 实验内容与任务(限500字)
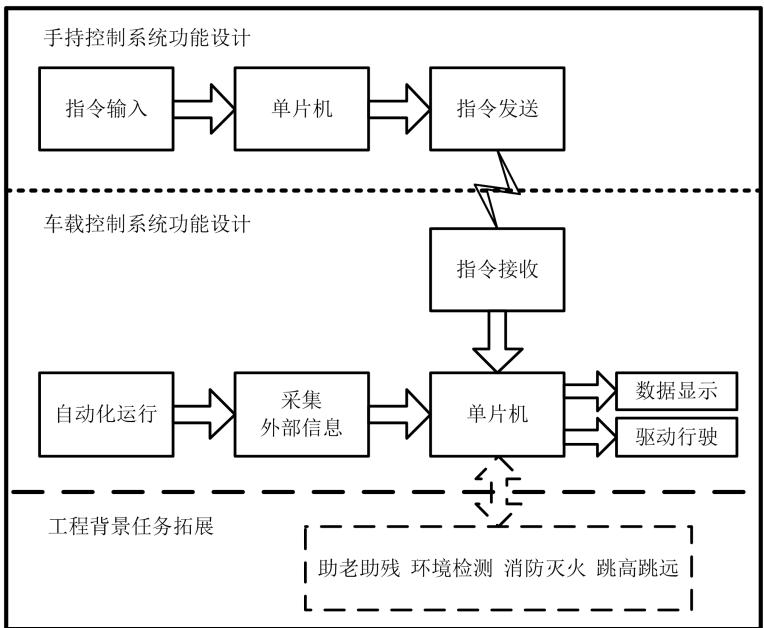
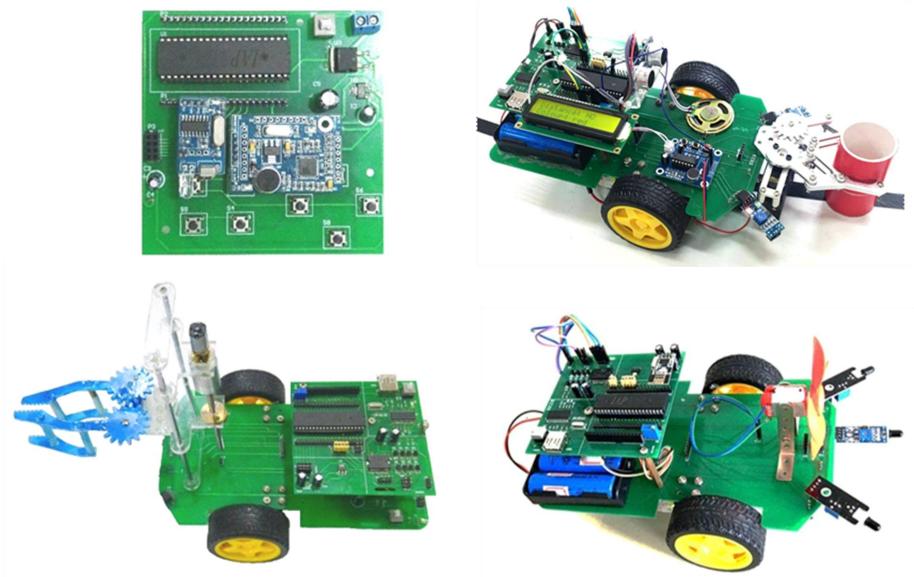
设计一款基于 CDIO 功能可重构的智能小车,小车分为手持控制系统和车载控制系统两部分。本实验分为两个层次:基础层和拓展层,基础层为智能小车的基本功能;拓展层为智能小车的工程应用。
基础层(必做)
(1) 手持控制系统
- 利用声音、机械按键或上位机,构思并设计一种指令输入电路,实现控制信息的采集;2) 根据近红外光或 2.4GHz 电磁波通讯方式,构思并设计一种无线信号发送电路,实现控制信息的传输。
(2) 车载控制系统
- 构思并设计一种相应的无线信号接收电路,实现控制信息的接收;
- 利用小型直流可控电机,构思并设计一种行驶驱动电路,实现车载控制系统的远程运动控制,运动包括:前进、后退、左转、右转、加减速和停止;
- 利用相关传感器,构思并设计两种及以上功能可重构自由组合的自动化运行控制电路,实现车载控制系统的智能运行,运行方式包括:循迹、避障、寻光、寻火、探色和测速等;
- 利用 LED 或液晶显示方式,构思并设计一种数据显示电路,实现车载控制系统的运行状态监测,可自定义要显示的监测内容。
拓展层(选做)
结合基础层完成情况,构思并合理设计一项工程背景任务,并自行扩展添加相应功能,实现智能车的工程应用,例如:助老助残、环境检测、消防灭火和跳高跳远等。
3. 实验过程及要求(限300字)
基础层(必做)
(1) 手持控制系统设计与制作
- 掌握单片机的工作原理和接口技术,设计单片机最小系统电路,熟悉 Altium designer、Keiluvision4、Proteus、STC-ISP 的使用;
- 合理设计供电系统,并根据输入电压范围、所需稳压值和最大输出功率选择合适的稳压芯片;
- 学习非编码键盘、语音芯片或串口通讯的工作原理,并选择其中一种方式用于指令输入,利用 ISP 下载器,结合上位机软件进行测试;
- 学习红外、蓝牙、WIFI 或 nRF 通讯原理,选择其中一种方式用于无线发送,注意其通讯特点。
(2) 车载控制系统设计与制作
- 设计单片机最小系统电路和供电系统;
- 根据手持控制系统所选择的无线发送方式,确定相应的无线接收方式,并利用红外解码仪或逻辑分析仪观察接收信号;
- 学习 PWM 信号控制原理,设计直流电机或舵机的驱动电路,并利用波形发生器对其进行调速测试;
- 对比不同传感器的测量精度和信号输出特性,选择合适的循迹、避障、寻火、寻光、测速和探色传感器,并利用示波器观察输出信号;
- 学习数码管、点阵或液晶的显示特性和原理,设计显示电路,构思显示内容,并利用 Proteus
软件对其进行仿真测试。
拓展层(选做)
任意构思拓展一项工程背景任务,设计实现工程应用。
完成上述步骤后,分模块焊接、制作、测试系统电路;编写程序,综合调试系统功能,记录调试过程;撰写课程总结报告,并分组答辩,学习不同方案的优点。
4. 相关知识及背景(限150字)
这是一个综合运用单片机、传感器和电工电子技术解决工程实际问题的典型案例,理论知识包括单片机原理与接口技术、模拟电路、数字电路、信号与系统等相关课程;本实验还需运用一些基本工程实践知识,如元器件的选型、电路设计、电路板的焊接、软硬件调试和检测仪表的使用等。
5. 教学目的(限100字)
基于工程项目产品开发背景和CDIO创新性实验设计方法,要求学生能够根据工程项目实际需求,参与到方案构思、自主设计、协作实施和运作考核的过程中。在专业知识方面,使学生掌握单片机控制技术、无线通讯技术、传感器检测技术和电工电子技术;在综合素养方面,使学生的系统思维、自主学习、合作沟通、批判创新等综合能力得到提高,培养成为具有现代工程素质的创新人才。
6. 实验教学与指导
本实验包含若干个完整的工程实践项目,需要经历学习研究、构思论证、设计系统、软硬件实现和运行总结等过程。在实验教学过程中,应在以下几个方面加强对学生的引导:
表 1手持控制系统教学与指导表
| 功能模块 | 教学内容 | 知识点讲解 | 难易程度 | |
| 公共模块 | IAP15F2K61S2单片机 | 单片机最小系统的组成 | ||
| 电源模块 | L7805、AMS1117稳压芯片 | 串联反馈式稳压电路的工作原理、滤波电容的选择 | ||
| 指令输入 | 键盘模块 | 矩阵键盘 | 逐行扫描法或反转法按键检测原理、软硬件消抖 | ☆ |
| 串口通讯 | 串口调试软件CH340串口芯片 | UART通讯协议、TTL 电平转换、串口调试软件的使用、单片机串口工作模式设置 | ★☆ | |
| 语音模块 | LD3320语音芯片 | LD3320初始化设置、非特定人语音识别技术、UART通讯协议 | ★☆☆ | |
| 指令发送 | 红外发送模块 | LD271红外发光二极管 | NEC 编码协议、PPM调制、二次调制 | ★ |
| 红外遥控器 | NEC 编码协议、用户码设置 | |||
| 无线发送模块 | ESP8266WIFI芯片 | UART通讯协议、TTL电平转换、串口调试软件的使用、主机模式的AT指令设置 | ★☆ | |
| HC-05蓝牙芯片 | UART通讯协议、TTL 电平转换、串口调试软件的使用、主机模式的AT指令设置 | ★★ | ||
| nRF24L01无线芯片 | SPI 通讯协议、发送模式配置 | ★☆★ | ||
表 2车载控制系统教学与指导表
| 功能模块 | 教学内容 | 知识点讲解 | 难易程度 | |
| 指令接收 | 红外接收模块 | 1838红外接收头 | NEC 编码协议、1838的反向输出特性、红外指令的解码 | ☆ |
| 无线接收模块 | ESP8266WIFI芯片 | UART 通讯协议、TTL 电平转换、串口调试软件的使用、从机模式的 AT 指令设置 | ☆☆ | |
| HC-05蓝牙芯片 | UART 通讯协议、TTL 电平转换、串口调试软件的使用、从机模式的 AT 指令设置 | ★★ | ||
| nRF24L01无线芯片 | SPI 通讯协议、接收模式配置 | ★☆☆ | ||
| 自动化运行 | 测速模块 | KLH-612L槽型光电藕合传感器 | 光敏三极管的通断原理、LM393集成运算放大器的使用、单片机定时器和中断设置 | ★ |
| 探色模块 | TCS230颜色传感器 | 白平衡原理、三原色判别、单片机定时器和计数器设置 | ★☆ | |
| 避障模块 | HJ-IR2红外避障传感器 | 信号调制、接收头输出特性、单片机中断设置 | ☆☆ | |
| HC-SR04超声波传感器 | 压电和逆压电效应、超声波测距原理、单片机定时器设置 | ☆☆ | ||
| 寻光模块 | 5506光敏传感器 | 光敏电阻的光电导效应、单片机内置A/D 转换器设置 | ☆☆ | |
| 寻火模块 | YS-17火焰传感器 | 光敏二极管的光伏效应、LM393 集成运算放大器的使用 | ☆☆ | |
| 循迹模块 | TCRT5000光电循迹传感器 | 光敏三极管的通断原理、LM393集成运算放大器的使用 | ☆ | |
| 电磁循迹传感器 | LC 谐振电路的工作原理、LMV358集成运算放大器的使用、单片机内置 A/D转换器设置 | ☆☆☆ | ||
| 数据显示 | LED 显示模块 | 数码管 | 共阴和共阳数码管的区别、74LS245 锁存器应用、段码和位码的设置、动态显示原理 | ☆ |
| LED 点阵 | 74LS245锁存器应用、静态和动态显示原理 | ☆☆ | ||
| 液晶显示模块 | LCD1602 | 并行通信方式、显示模式设置、显示对比度调节 | ☆☆ | |
| 驱动行驶 | 直流电机 | L298N驱动芯片 | 双H桥驱动电路的组成及工作原理、调速方式:定宽调频、调频调宽、定频调宽 | ★ |
| 直流舵机 | PCA模块 | 舵机闭环控制的工作原理、PCA 模块的工作模式设置、调速方式:定频调宽 | ☆☆ | |
表 3工程背景任务拓展教学与指导
| 功能模块 | 教学内容 | 知识点讲解 | |
| 助老助残 | 机械手模块 | 步进电机 | 达林顿晶体管阵列组成及工作原理、ULN2003的反向输出特性、步进电机的特性参数(相数、步距角、拍数、输入脉冲频率)、丝杠丝母运动副式移动平台和圆柱型直齿轮啮合传动双臂式机械手工作原理 |
| 环境检测 | 环境感知模块 | DHT11温湿度传感器 | 单总线协议和DHT11的输出特性 |
| MQ-9一氧化碳传感器 | 二氧化锡的导电特性、MQ-9 的输出特性、单片机内置A/D转换器设置 | ||
| 消防灭火 | 水泵/风扇灭火模块 | 水泵/风扇 | 双H桥驱动电路组成及工作原理、单片机定时器设置 |
| 跳高跳远 | 跳跃模块 | 继电器、电磁阀、气动缸 | 继电器的电磁效应和应用电路的搭建、二位五通电磁阀控制原理、直线运动气缸的工作原理和理论输出力的计算方法 |
注:表中的难易程度是在实现同一功能的不同方案之间进行比较。
7. 实验原理及方案
(1) 系统结构(2) 实现方案
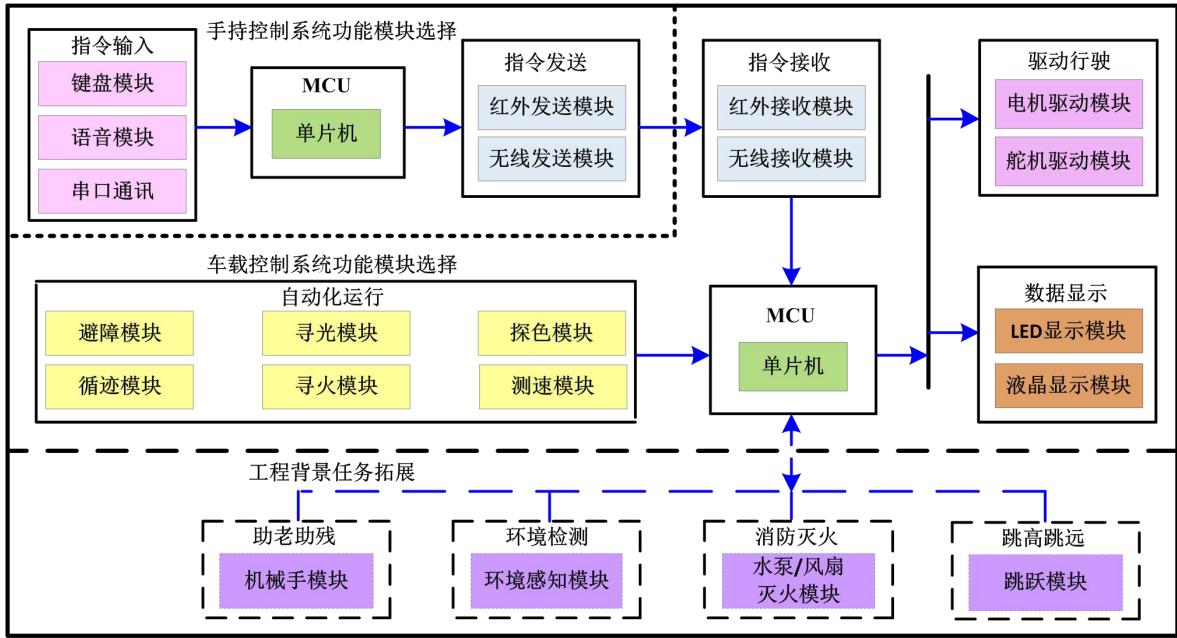
注:可自行拓展其他功能
手持控制系统实现方案:指令输入可以采用键盘模块、语音模块或串口通讯,MCU 接收并分析处理输入指令,而后利用红外发送模块或无线发送模块来发送指令。
车载控制系统实现方案:当小车处于无线控制状态下,指令接收采用与指令发送相对应的组件,如红外接收模块或无线接收模块,接收到的指令输出给 MCU,经 MCU 分析判断后控制小车驱动行驶,驱动行驶可以采用电机驱动模块或舵机驱动模块;当小车处于自动化运行状态下,可利用避障模块、循迹模块、寻光模块、寻火模块、探色模块或测速模块的自由组合实现功能可重构,各模块采集相关参数,经 MCU 分析处理后,控制小车智能行驶,并通过 LED 模块或液晶显示模块将数据输出显示。
工程背景任务拓展实现方案:在上述基础上,选择或自行构思一项工程背景任务,如利用机械手模块实现助老助残、环境感知模块实现环境检测、水泵/风扇灭火模块实现消防灭火或跳跃模块实现跳高跳远。
8. 教学实施进程
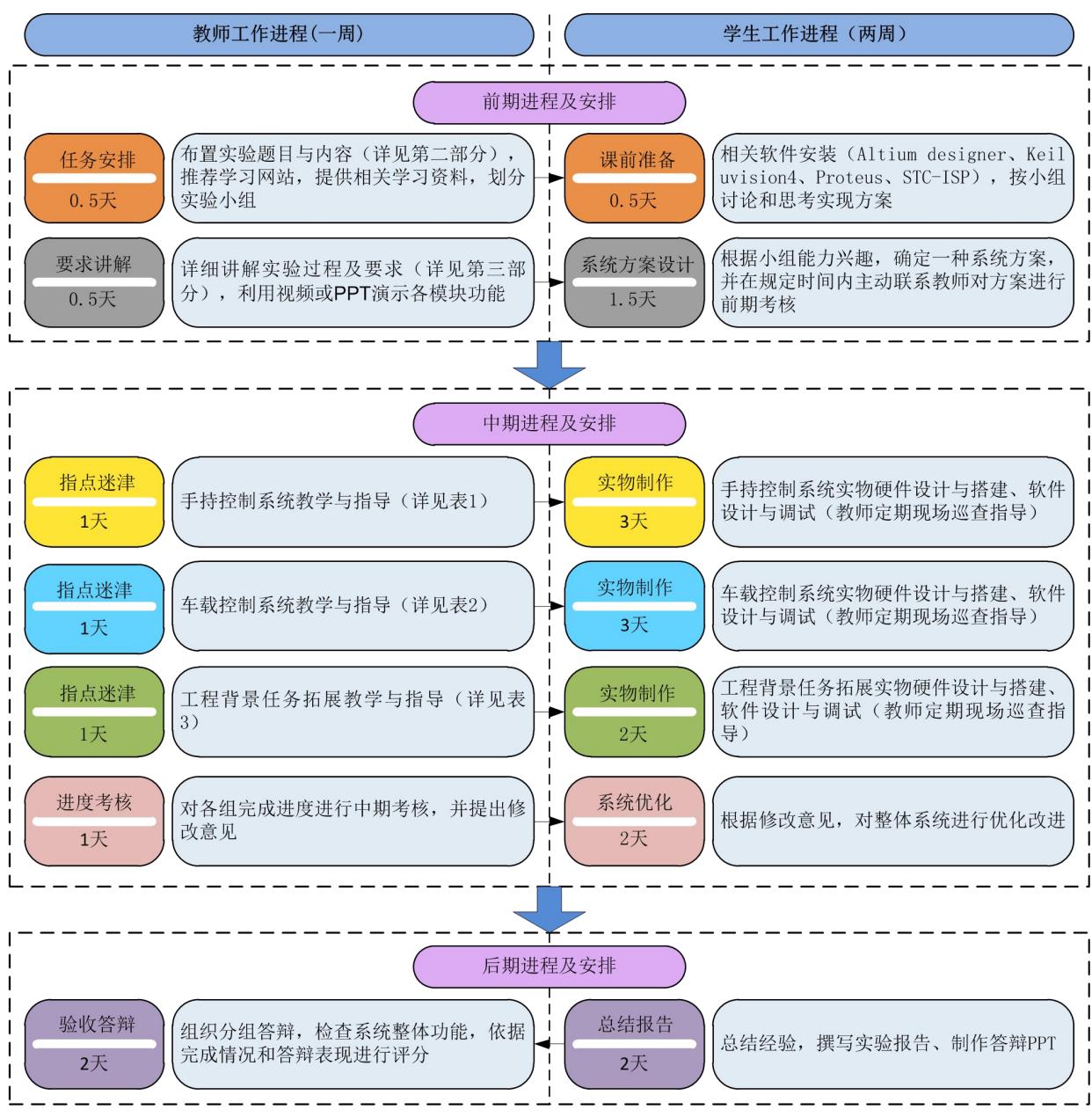
注:周六、周日实验室正常开放
9. 实验报告要求
实验报告需要反映以下工作:
(1) 实验任务及要求
(2) 系统方案设计
(3) 手持控制系统硬件电路设计
(4) 车载控制系统硬件电路设计
(5) 工程背景任务拓展硬件电路设计
(6) 系统软件程序设计
(7) 系统测试
(8) 总结分析
10.考核要求与方法(限300字)
前期考核(15分):
(1) 系统方案设计:系统方案设计的可行性和合理性;
(2) 系统方案创新:系统实现方案的创新性和新颖性。
中期考核(21分):
(1) 合作能力考核:实验过程中学生的团队合作、沟通协调能力;
(2) 排错能力考核:实验过程中自主学习、分析和解决问题的能力。
后期考核(64分):
(1) 实物结果验收:多功能智能小车的基础层和拓展功能的运行质量、模块元件布局、导线连接工艺;(2) 实验报告验收:提交电子版和纸质版实验报告各一份,要求报告内容详实完整,格式规范。
11. 项目特色或创新(可空缺,限 150字)
(1) 融入 CDIO(构思—设计—实现—运作)国际先进教育理念,从工程基础知识、个人能力、人际团队能力和工程系统能力四个层面实现对学生的培养;(2) 项目知识点全面、综合性强、内容分层次、方案设计选择性丰富,功能可重构性强;(3) 学生可以根据自己的意愿添加想要的功能并进行学习,为学生提供了更大的发挥和创新的空间。
实验案例信息表
| 案例提供单位 | 江苏科技大学张家港校区机电与动力工程学院 | 相关专业 | 机械电子工程机械制造及其自动化电气工程及其自动化 | ||||
| 设计者姓名 | 金琦淳 | 电子邮箱 | 694146000@qq.com | ||||
| 移动电话 | 15298800896 | 通讯地址(含邮编) | 江苏省张家港市长兴中路8号 | ||||
| 设计者姓名 | 袁明新 | 电子邮箱 | 429622974@qq.com | ||||
| 移动电话 | 15601561086 | 通讯地址(含邮编) | 江苏省张家港市长兴中路8号 | ||||
| 设计者姓名 | 王琪 | 电子邮箱 | 446471055@qq.com | ||||
| 移动电话 | 15006105810 | 通讯地址(含邮编) | 江苏省张家港市长兴中路8号 | ||||
| 相关课程名称 | 电子系统综合课程设计 | 学生年级 | 大三 | 学时(课内+课外) | 3周(1周+2周) | ||
| 支撑条件 | 仪器设备 | 直流稳压电源、红外解码器、示波器、数字万用表 | |||||
| 软件工具 | Altium Designer、Keil uVision、Proteus、STC-ISP | ||||||
| 主要器件 | IAP15F2K61S2单片机、L7805 稳压芯片、AMS1117稳压芯片、矩阵按键、CH340 串口芯片、LD3320 语音芯片、LD271红外发光二极管、红外遥控器、ESP8266WIFI芯片、HC-05 蓝牙芯片、nRF24L01、1838 红外接收头、KLH-612L槽型光电耦合传感器、TCS230颜色传感器、HJ-IR2 红外避障传感器、HC-SR04超声波传感器、5506光敏传感器、YS-17火焰传感器、TCRT5000光电循迹传感器、数码管、LED 点阵、LCD1602、L298N 驱动芯片、步进电机、DHT11温湿度传感器、MQ-9一氧化碳传感器、水泵、风扇、继电器、电磁阀、气动缸、电容、电感、电阻、三极管、杜邦线等 | ||||||
附件一:前期考核评分表
| 阶段 | 考核内容 | 考核细则 | 考核方式 | ||
| 判定方法 | 分数细分 | 得分 | |||
| 前期 | 方案设计 | 方案合理性(10分) | 系统结构图规范、美观;方案文字描述逻辑严谨、思路清晰;系统功能有一定的实现难度,工作量饱满 | 10分 | |
| 系统结构图较为规范、美观;方案文字描述较为清晰、明确;系统功能略有实现难度,工作量较饱满 | 8分 | ||||
| 系统结构图基本规范,但美观性略有欠缺;方案文字描述落存在模糊点;系统功能难度一般,工作量一般 | 6分 | ||||
| 系统结构图不规范处较多;方案文字描述有逻辑错误,模糊点较多;系统功能较为简单,工作量不足 | 4分 | ||||
| 方案新颖性(5分) | 参考范围外的功能个数 | 1分/个 | |||
| 总分: | |||||
附件二:中期考核评分表
| 阶段 | 考核内容 | 考核细则 | 考核方式 | |||
| 判定方法 | 分数细分 | 得分 | ||||
| 中期 | 合作能力 | 检查任务整体完成进度(11分) | 手持控制系统 | 指令输入是否完成 | 1分 | |
| 无线收发是否完成 | 3分 | |||||
| 车载控制系统 | ||||||
| 驱动行驶是否完成 | 1分 | |||||
| 自动化运行是否完成 | 2分 | |||||
| 数据显示是否完成 | 2分 | |||||
| 工程背景任务拓展(一项)是否完成 | 2分 | |||||
| 排错能力 | 制作过程细节(10分) | 设置5个问答题 | 2分/题 | |||
| 总分: | ||||||
附件三:后期考核评分表
| 阶段 | 考核内容 | 考核细则 | 考核方式 | ||
| 判定方法 | 分数细分 | 得分 | |||
| 后期 | 实物验收 | 基础层完成情况(34分) | 全部功能演示是否成功以及成功实现部分难易程度 | 演示全部通过10分;对于基础层,奖励1分/☆ | |
| 拓展层完成情况(5分) | 所用器件结构设计和布置是否合理 | 1分 | |||
| 拓展层与基础层软件综合调试是否成功 | 2分 | ||||
| 所完成的拓展层功能实现难度及工作量 | 1分 | ||||
| 拓展层功能的工程应用前景是否广阔 | 1分 | ||||
| 模块元件布局与导线连接工艺(5分) | 各模块的元器件布局是否合理 | 1分 | |||
| 电源导线选择是否规范,不同类型的信号线是否区分颜色 | 2分 | ||||
| 导线走线是否合理,连接是否牢靠,扎线是否整齐美观 | 2分 | ||||
| 答辩 | 实验报告(10分) | 语言精练通顺,报告结构规范,图表质量高 | 10分 | ||
| 语言较通顺,报告结构较规范,图表质量较高 | 8分 | ||||
| 语言欠通顺,报告欠规范,图表质量不够高 | 6分 | ||||
| 语言不通顺,报告潦草,图表质量较差 | 4分 | ||||
| 分组答辩(10分) | 反应灵敏,思路清晰,回答问题正确 | 10分 | |||
| 思路清晰,表达清楚,回答问题基本正确 | 8分 | ||||
| 回答问题基本正确,有次要错误 | 6分 | ||||
| 主要问题答非所问,有较多原则性错误 | 4分 | ||||
| 总分: | |||||