基于PWM的智能发球器系统设计






实验题目:基于PWM的智能发球器系统设计
课程简要信息
课程名称:电子装配实习
课程学时:40学时
项目学时:10学时(课内)+6学时(课外)
适用专业:电子科学与技术、通信工程、自动化、电子信息等相关专业
学生年级:大二上学期(第3学期)
实验内容与任务(限500字,可与“实验过程及要求”合并)
实验内容:
本实验内容为电子信息、物联网工程和计算机软件三门学科的综合,要求学生基于PWM原理,设计制造简单系统——智能发球器系统。学生进行电路设计、元器件焊接、编程调试,数据记录与处理。
最终效果为结合PWM原理,控制器可以控制电机旋转速度与云台的俯仰角,继而控制小球发射的初速度与角度,最终控制小球发往目标区域。
为了激发学生的创新性,兼顾学科竞赛选拔,将任务分为了基本任务和扩展任务:
基本任务必选,为本实验主要目标;扩展任务可选,需要学生独立思考、创新之后,才有可能完成。
基本任务:
电路设计、制作部分:
(1)完成电路设计,完成主控板电路原理图和PCB图设计。
(2)完成电路板元器件焊接,掌握手工焊接工艺。
编程测试部分:
(3)完成软件编程与调试,通过移动端控制电机的转速以及云台俯仰角度,最终控制乒乓球的发射距离。
(4)进行标定实验,分别测量不同俯仰角、发球初速度情况下小球的投射距离,记录实验数据,拟合出三者之间的关系。
(5)学生根据拟合出的公式,由已知投射距离,计算出相应的俯仰角与电机转速,并进行投射,检验投射精度。
扩展任务:
主控板搭载无线测距模块,由测量得到的距离,直接在移动端给出推荐的电机转速与俯仰角。
实验过程及要求(限300字)
本实验在实现过程中,根据课程类别划分为不同的子过程来完成,具体过程和
要求参考表 3.1。
表3.1 实验过程及要求
| 序号 | 类别 | 实验过程 | 要求 |
|---|---|---|---|
| 1 | 电路设计 | 原理图设计、PCB设计 | 掌握电路设计与PCB板绘制规则 |
| 2 | 元器件焊接 | 手工焊接 | 完成控制板元器件的焊接 |
| 3 | 发球器组装 | 硬件组装 | 完成发球器各模块的硬件组装 |
| 4 | 软件编程、调试 | 软件编程、下载与调试 | 编程实现手机端控制云台俯仰角以及电机旋转速度 |
| 5 | 数据记录与处理 | 标定实验数据记录 | 开展标定实验,在发球器高度一定情况下,测量不同俯仰角度、电机转速下发球距离,并记录实验数据 |
| 6 | 数据处理 | 由实验数据拟合出电机转速、发球器俯仰角以及发射距离之间的公式,并实地进行检验。 |
相关知识及背景(限150字)
这是一个多个学科交叉融合的实验,将电子电路设计、软件编程、物联网工程等课程理论运用到实际生活中,需要掌握电子电路设计技术、手工焊接技术、PWM原理、软件编程、数据处理等相关知识以及串口通信原理、控制变量、设备标定等工程概念与方法。
实验环境条件 {#实验环境条件}
实验所需环境如表5.1所示:
表5.1 实验环境
| 序号 | 设备/工具 | 型号/名称 |
|---|---|---|
| 1 | 实验仪器设备 | 万用表、电烙铁、杜邦线,电子调速器若干 |
| 2 | PCB设计软件 | 立创EDA、Aultium Designer等 |
| 3 | 计算机编程软件 | Arduino IDE |
| 4 | 辅助软件 | Blinker、Matlab等 |
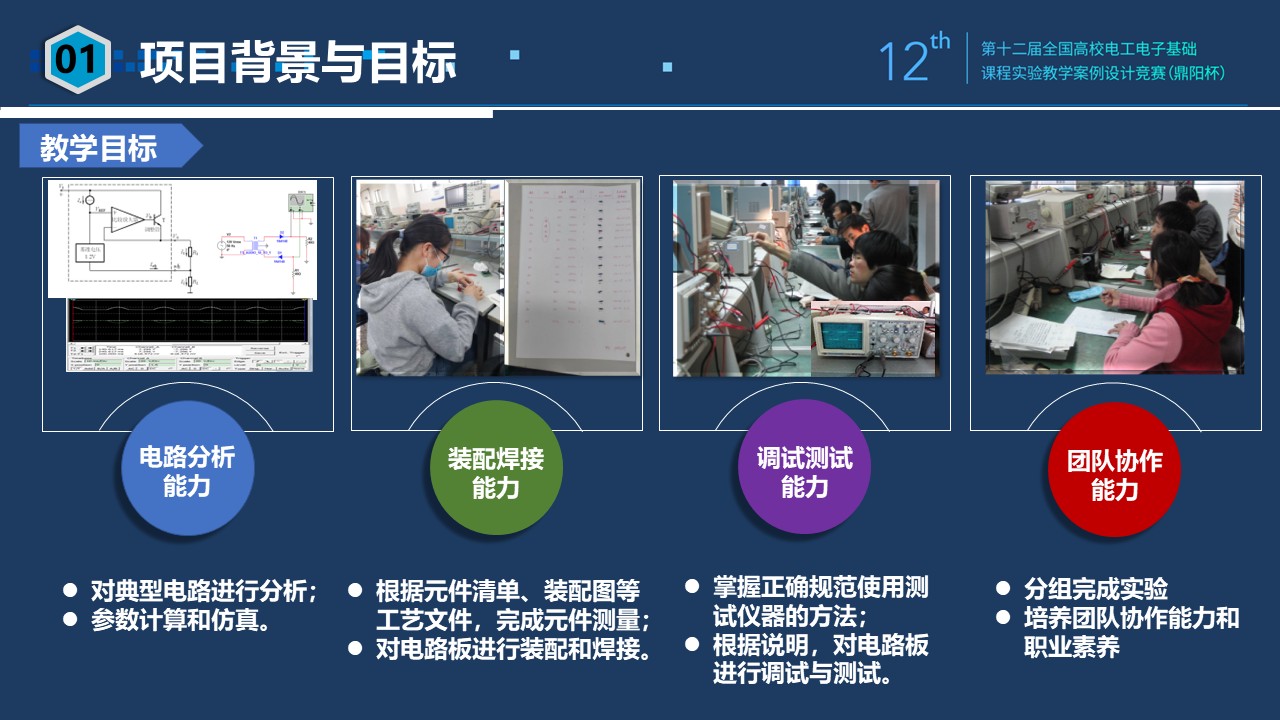
教学目标与目的(限150字)
思政目标
-
培育学生求真务实、精益求精的工程素养和工匠精神。
-
激发学生的创新思维,培养学生团结协作的精神。
(3)促进学生热爱生活,培养追求真善美的人文情怀和家国情怀。
能力目标
-
帮助学生提升电路设计能力和手工焊接技术。
-
帮助学生认知单片机,并提高嵌入式系统开发能力。
-
培养学生学科交叉工程融合能力。
-
培养学生处理、分析实验数据的能力。
教学设计与实施进程
教学设计:
本实验内容为电子信息、物联网工程和计算机软件三门学科的综合,需要学生在掌握三门课程的基础理论课程的基础上完成实际应用,同时培养学生工程素养和创新能力。
基于此,设计了基于PWM原理的智能发球器。在此过程中需要设计符合电路原理的电路板、手工焊接电子元器件、学习PWM基本原理与应用、使用软件开发工具进行软件编程、实验数据的记录与处理等,通过这一系列实践,培养学生掌握电子产品设计与制作过程中的必备技能,基于技术指标要求,学生要经历学习研究、需求分析、系统设计、实现调测、数据处理、设计总结等过程。为了学生能在实验中不断突破自我,本次实验将拆分为若干个阶段性任务,在实践教学中,应该对以下方面加强对学生的指导:
-
相关电子元器件参数,设计控制板的电路原理图与PCB图;
-
手工焊接技术,控制板元器件的焊接;
-
单片机编程,调试,结合PWM原理,控制电机旋转速度与云台俯仰角;
-
云服务器创建云端设备,设备接入物联网,实现无线控制小球发射;
-
开展标定实验,记录实验数据,并拟合出小球发射距离与电机转速和俯仰角的关系。
实施进程:
具体的教学设计与实施进程如下表7.1所示:
表7.1教学设计与实施进程
| 序号 | 实验内容 | 实验学时 | 实验步骤 | 具体引导目标 | |
|---|---|---|---|---|---|
| 课内 | 课外 | ||||
| 1 | 电路设计 | 2 | 1 | 学生用EDA软件完成原理图和PCB图设计 | 引导学生掌握电路设计规则,自主设计主控板原理图和PCB图。 |
| 2 | 手工焊接 | 3 | 1. 学生完成电路板焊接 2. 软件环境搭建,实现点灯,验证焊接质量 |
引导学生完成手工焊接,完成主控板的制作。 | |
| 3 | 编程、下载、调试 | 3 |
2. 教师介绍编程环境与程序流程 3. 学生完成编程与系统调试 |
1.引导学生学习PWM基本原理 2.引导学生实现代码编写、下载与调试,实现电机与舵机的无线控制。 |
|
| 4 | 实验数据记录与处理 | 2 | 1. 学生开展标定实验,记录实验数据 2. 学生由记录的数据,拟合出发射距离与电机转速、俯仰角的关系 |
引导学生如何进行标定实验,并掌握实验数据的记录与处理。 | |
| 5 | 翻转课堂,创新方案设计 | 2 | 1 | 1. 学生由已知的发射距离,设置发球角度与电机转速,观察发球效果 2. 根据现有问题,学生设计改进方案,进行可行性验证 |
引导学生积极验证,巩固所学的知识,培养学生的创新精神,勇于突破自我。 |
| 6 | 撰写实验报告 | 2 | 学生撰写实验报告 | 引导学生完成实验报告,要求完整、规范、逻辑清晰。 | |
实验原理及方案
(1)系统结构
本项目主控板以ESP8266芯片为核心,该芯片是一款的低成本、低功耗无线Wi-Fi芯片,采用先进的CMOS工艺制造,集成了主处理器、Wi-Fi模块、存储器和各种接口等多个功能单元,使得整个系统非常紧凑和集成化。发球器模块搭载两台电机,结合PWM原理,主控板可以调节电机旋转速度,继而控制小球的初速度。将发球器搭载在云台上,通过调节俯仰角,控制小球的发射角度。利用ESP8266主控板的物联网功能,接入远程服务器,实现移动端控制小球发射距离。
按照本系统所需功能,系统硬件结构可以划分为四大主要部分:发球器模块、云台模块、ESP8266主控板以及移动端控制模块,该系统总体结构如图8.1所示:
图8.1 系统总体结构图
(2)具体实现
本方案以ESP8266无线模组为核心设计主控板,结合PWM原理,主控板控制小球的发射初速度与发射角度。为方便控制,主控板需接入远程服务器,通过设计可视化界面,移动端可以显示并调节电机旋转速度与云台的俯仰角,最终实现无线发球器平台的设计。
a) 硬件电路设计
本设计MCU采用的安信可公司ESP8266-12F系列单机来设计原理图,本设计的电路原理图如图8.2所示。
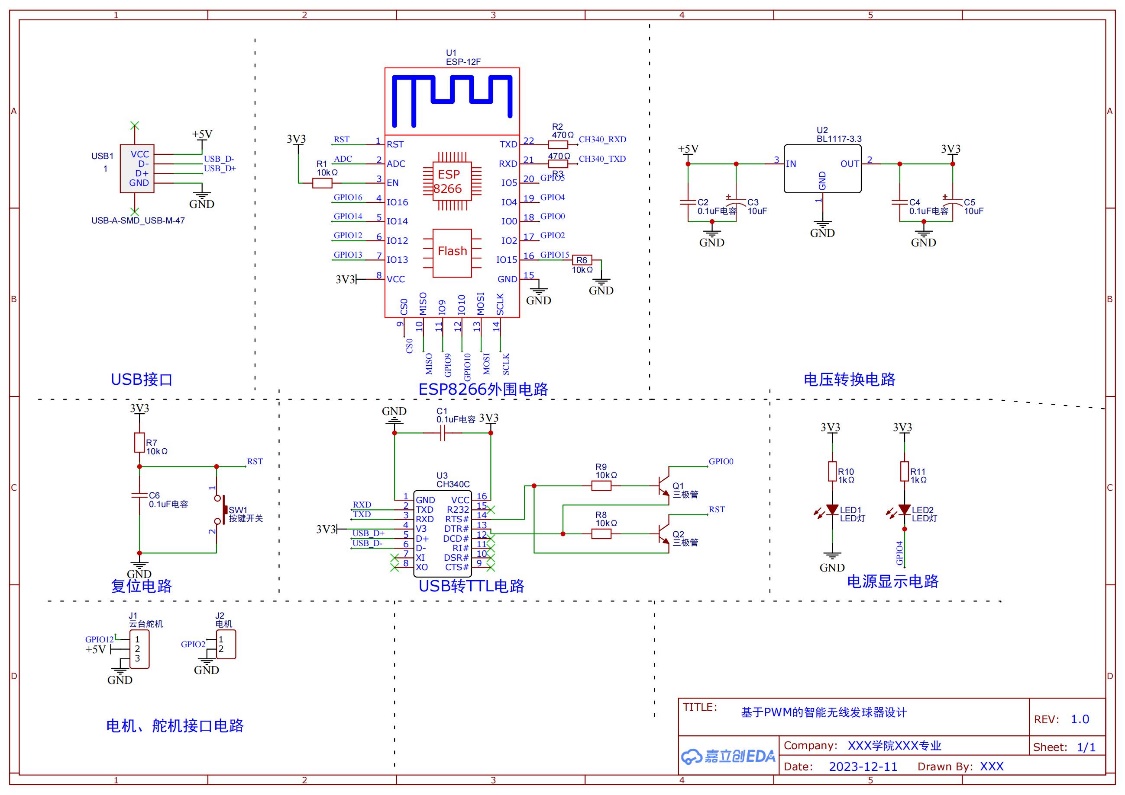
图8.2 基于PWM的智能发球器主控板电路原理图
·电源电路
ESP8266最小系统板的需求电压是3.3V,电路板的供电电压由USB接口5V电压提供。需要设计一个电压转换电路将5V电压转换为3.3V电压,选用BL1117电压转换芯片,同时设计一个电源LED用于显示电源是否上电,图8.3为电压转换电路。
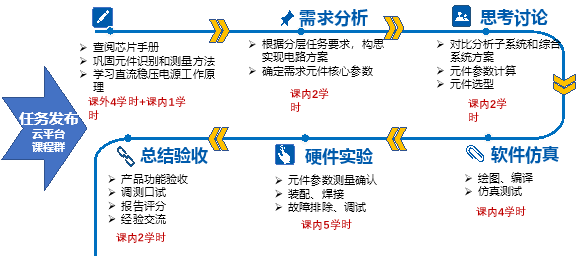
图8.3 电压转换电路
·CH340C程序下载电路
本设计采用的是USB总线的转接片CH340芯片,该芯片是USB转串口芯片,广泛用于连接计算机与各种嵌入式系统、单片机以及其他电子设备的通信。在本设计中,该芯片用于将USB信号转TTL信号,具体电路如图8.4所示。
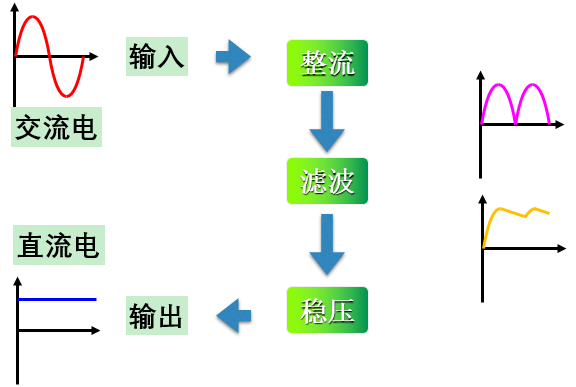
图8.4 USB转TTL电路
·电机与云台舵机接口电路
电机与云台舵机均通过GPIO口与主控板相连,基于PWM原理,可以分别控制舵机的旋转角度与电机的转速,其接口电路如图8.5所示。
图8.5 电机、舵机接口电路
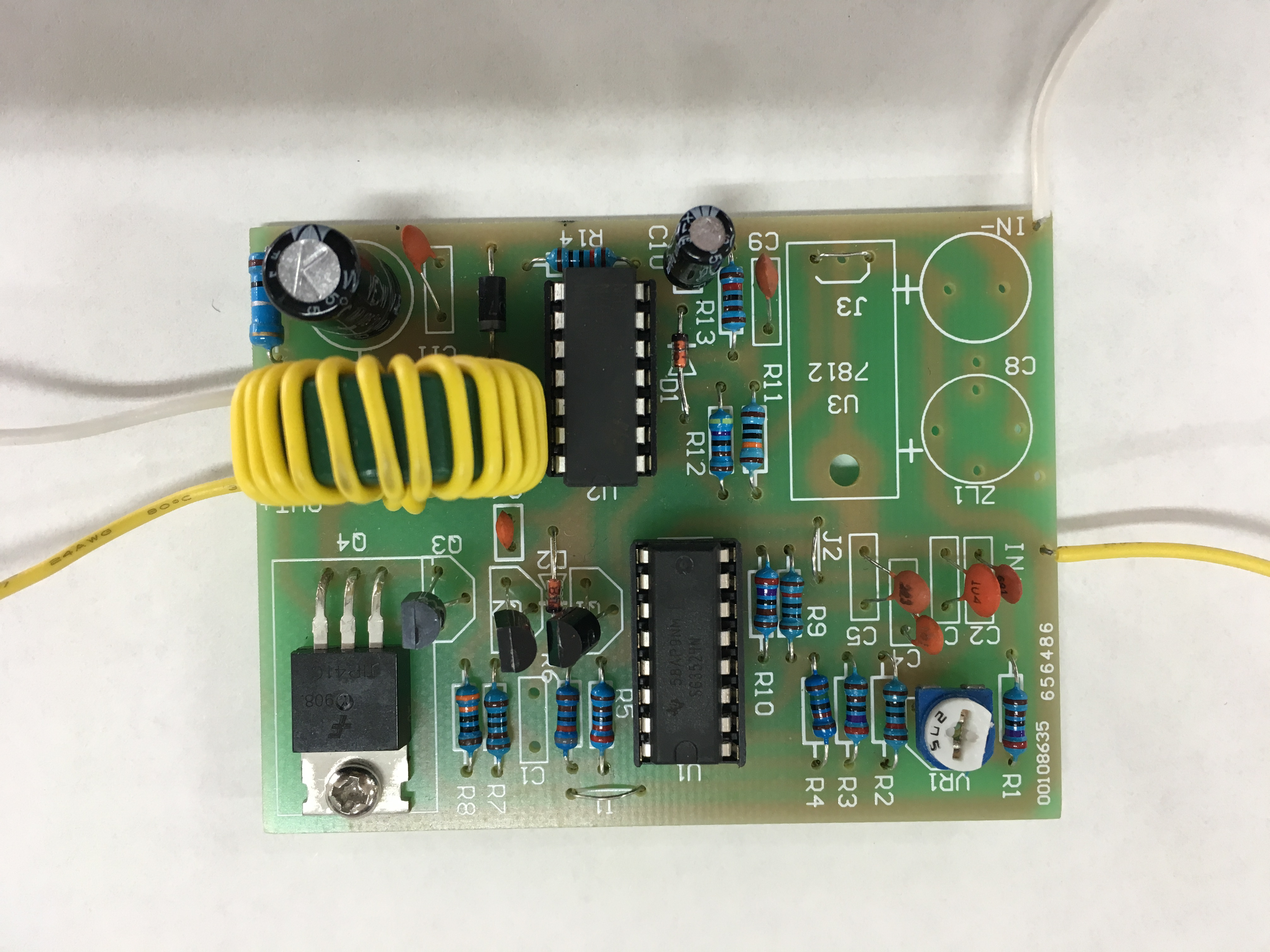
b) 电路板元器件焊接
电路设计完成之后,学生需要学习手工焊接技术,完成电路板元器件的焊接,并进行简单的焊接质量检测,焊接后的电路板如图8.6所示。
图8.6 电路板成品
c) 发球器模块、云台模块硬件组装
发球器搭载两台微型电机,分别搭载边缘覆盖橡胶圈的“车轮”,以增大摩擦力,减小动能的损失。为确保发球的稳定性,发球器两端需安装导轨,在实验过程中,学生需要手动组装发球器。云台核心部件为舵机,通过控制舵机旋转角度,继而控制云台台面的俯仰角。实验中,电机、云台舵机通过GPIO口连接到ESP8266主控板,结合PWM原理,调节电机旋转速度与舵机的旋转角度,最终控制发球初速度与俯仰角,发球器模块实物如图8.7所示。
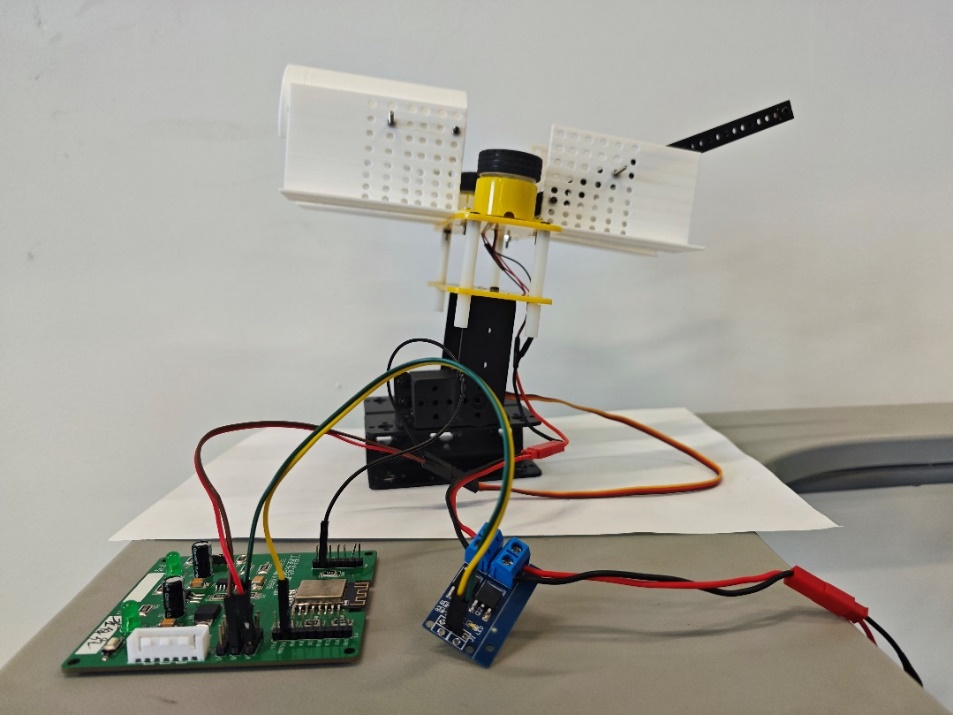
图8.7发球器模块成品
d) 系统软件设计
为培养学生的软件开发能力,本系统软件设计部分主要为主控板结合PWM原理控制发球器模块发射小球的初速度与俯仰角,利用ESP8266芯片的联网功能,主控板接入远程服务器,移动端可以显示并调节电机旋转速度与云台的俯仰角,最终实现智能发球器平台的软件设计,程序设计流程图如图 8.8 所示。
图8.8 方案软件设计流程图
学生需借助Blinker软件,设计手机端可视化界面,并实现远程控制小球发射距离,操作界面如图8.9所示。
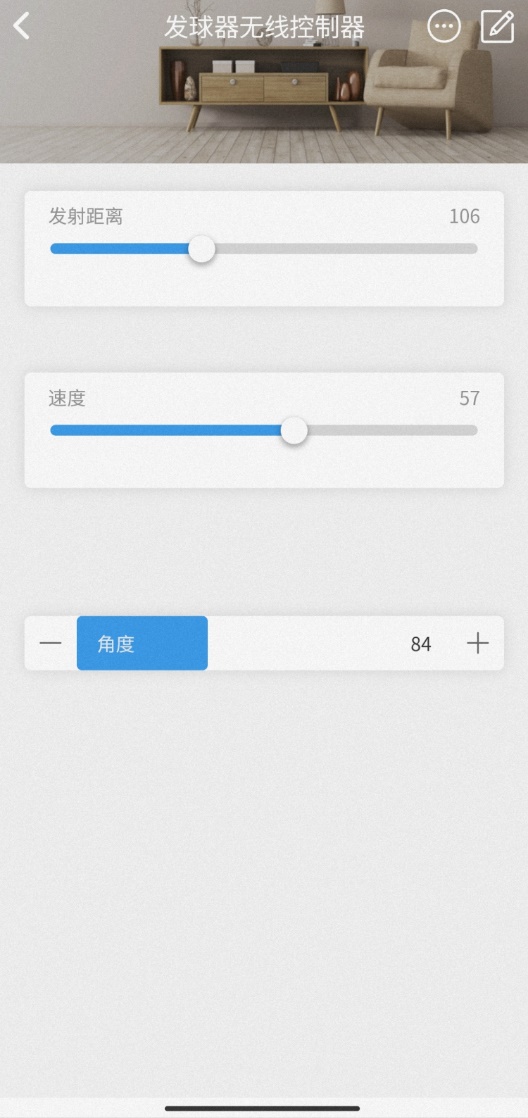
图8.9 方案软件设计流程图
实验报告要求
- 硬件电路设计
根据系统要求,划分单元模块电路,并细化设计方法,电路板原理图和PCB图的设计原则。
- 元器件焊接
详细描述手工焊接技术与注意事项。
- 系统软件调试
体现编程和调试的步骤以及过程,关键步骤可以用伪代码来表示。
- 数据处理与分析,成果展示
根据标定实验结果,拟合出发射距离与电机转速、俯仰角的关系,并将关键数据列表格,根据现场发射结果,分析拟合结果。
- 创新方案设计
详细记录进阶任务的创新方案设计,包含功能要求、可行性分析、总体架构与方案实现、软件功能实现与元器件清单、团队成员分工等。
- 实验小结
对本次实验项目进行反思与总结,提出改进方向。
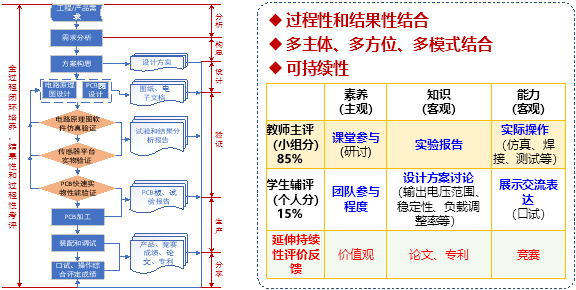
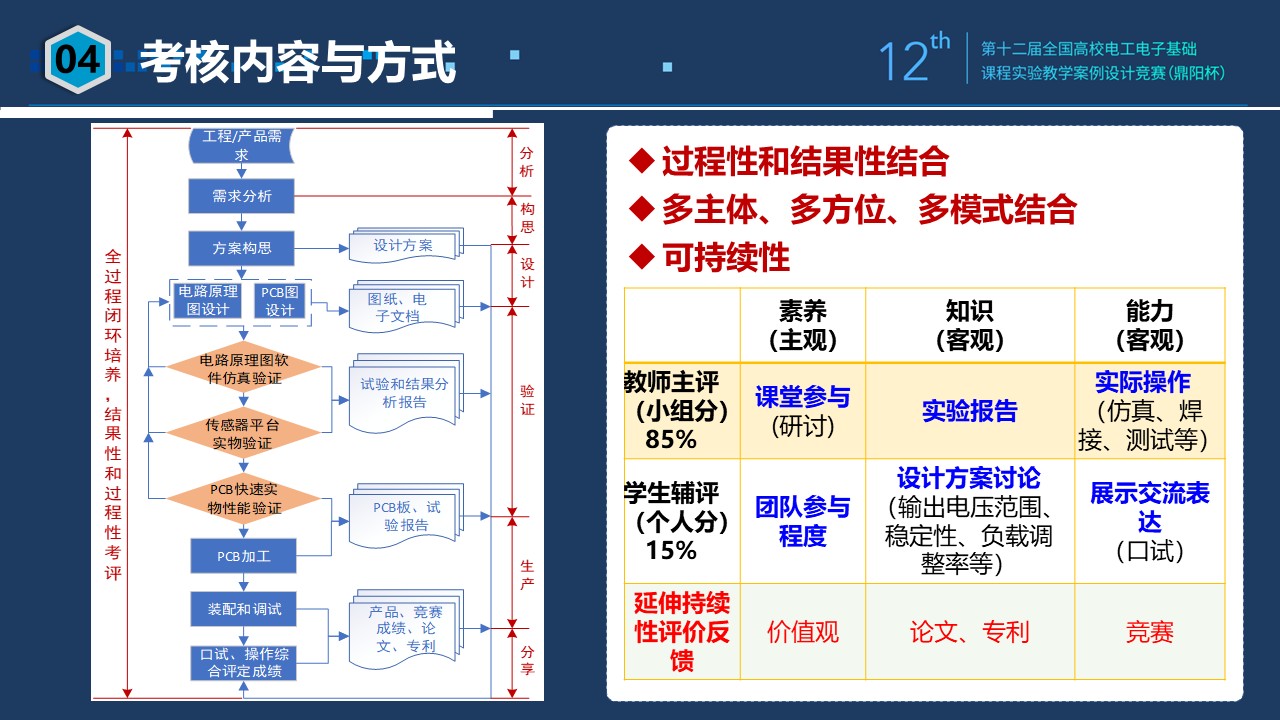
考核要求与方法(限300字)
考核方式采用分阶段多元化方式,如下表所示:
表10.1 考核方法及要求
| 小组名称: | |||||
|---|---|---|---|---|---|
| 学院: | 专业班级: | ||||
| 成员1学号姓名: | 成员2学号姓名: | 成员3学号姓名: | |||
| 项目 | 基于PWM的智能发球器系统设计 | ||||
| 序号 | 验收节点 | 验收时间 | 完成情况描述 | 评分 | |
| 1 | 电路设计 | 原理图设计规范、清晰、准确、易读(10分), PCB设计符合设计规范,DRC检查无错误等(10分) |
|||
| 2 | 元器件焊接 | 焊点机械强度高、导电性好、较美观(25分) | |||
| 3 | 基础任务成果展示 | 目标区域放置箱子,每组投放15球,由投入箱内球的数量计算得分(15分)。 | |||
| 4 | 拓展任务设计、汇报与实现 | 创新性强、可行性高、表达能力强(20 分) | |||
| 5 | 实验报告 | 规范、完整、全面(20分) | |||
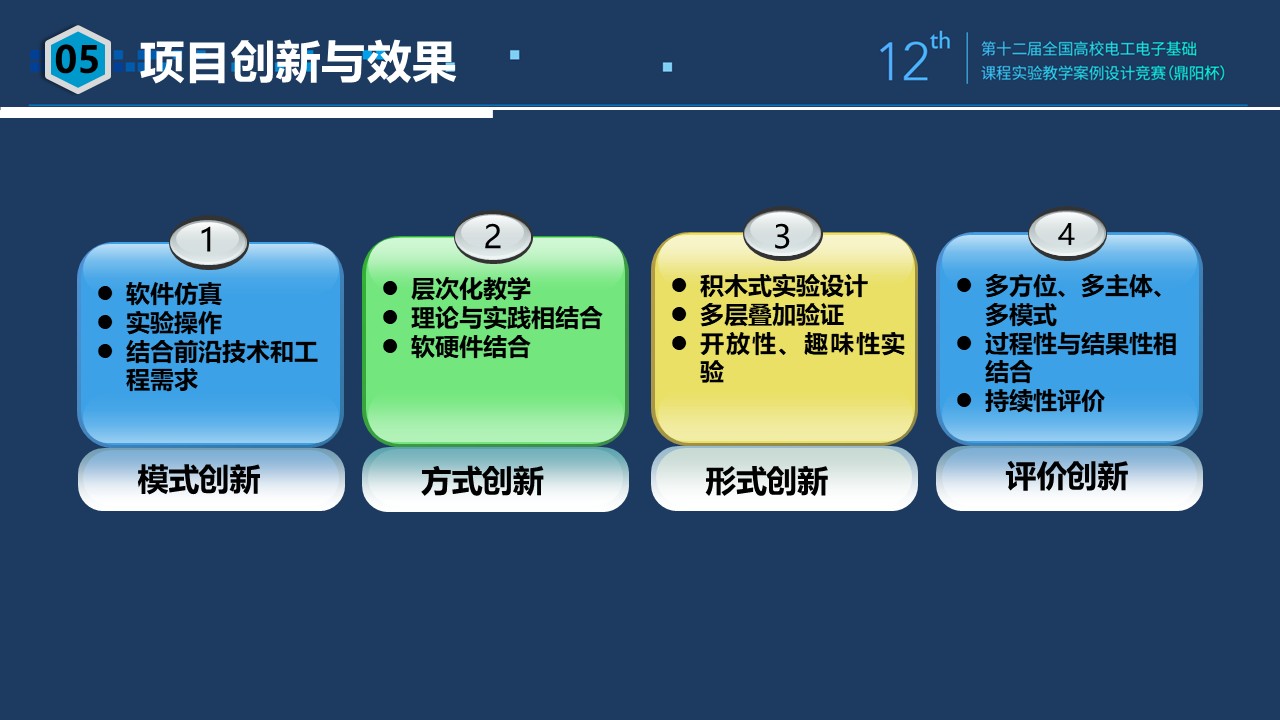
项目特色或创新(可空缺,限150字) {#项目特色或创新可空缺限150字}
(1)专业融合:该项目包含电子电路设计、软件编程、物联网等多门学科,具有较强的系统性与综合性;
(2)混合教学:依托云课堂等线上资源,开展线上线下混合式教学;
(3)创新性高:改进现有发球平台,使其具有智能控制发球距离的功能,提升学生的创新能力;
(4)趣味性较强:本实验结合体育场景,易于学生理解,趣味性较强。
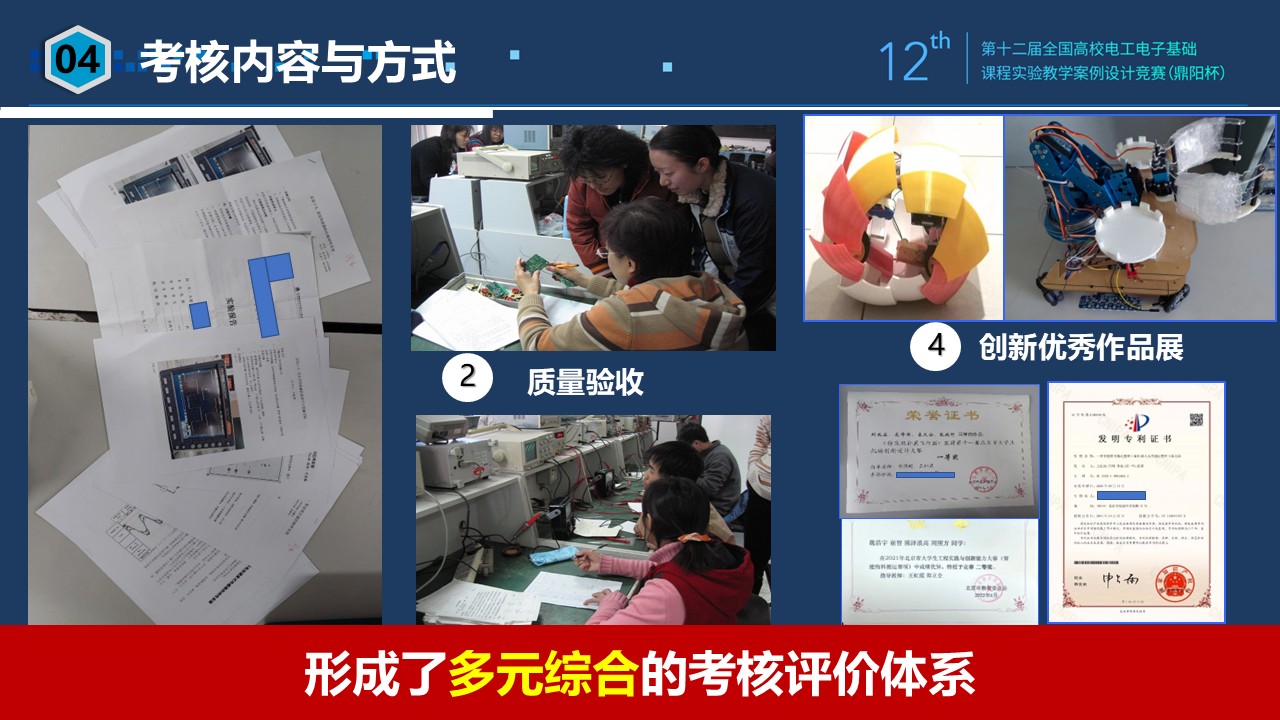
附录一:
学生实验现场照片



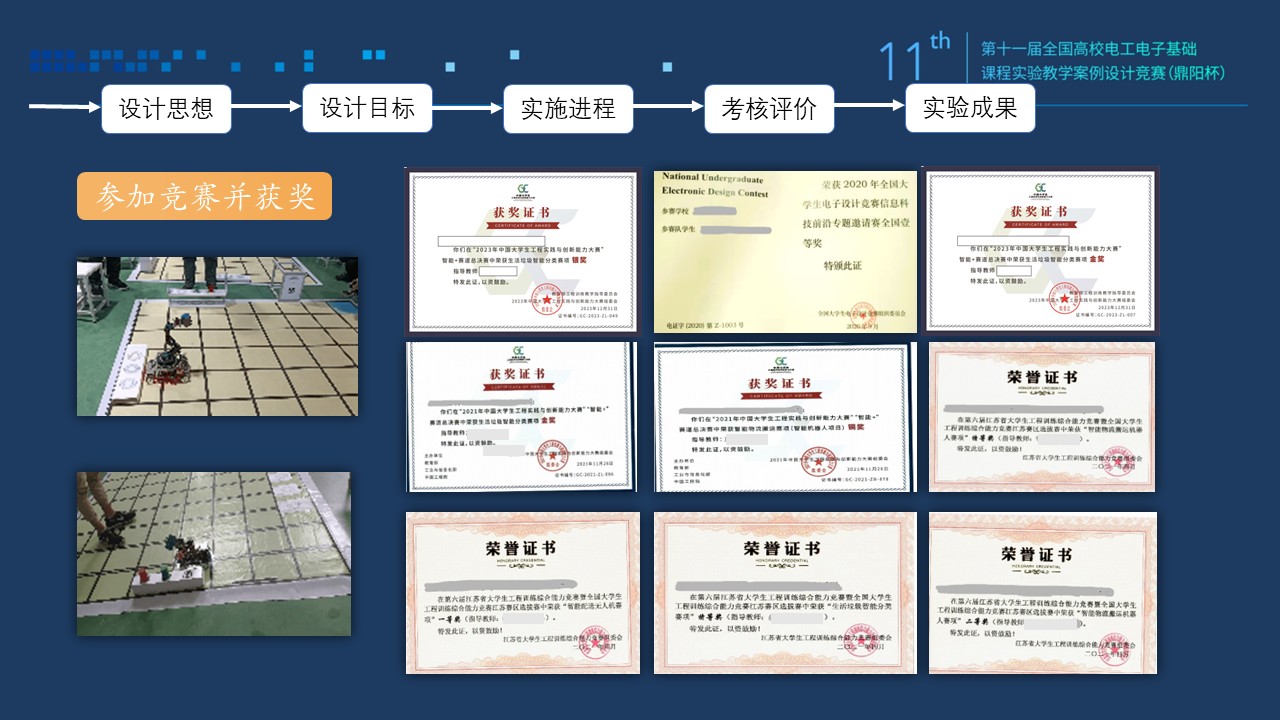
附录二:
教学成果



附录三:
采用easy云课堂进行教学管理