
基于单片机的智能送餐机器人设计








实验题目:
智慧冬奥展现科技强国---基于单片机的智能送餐机器人设计
课程学时: $1 6 + 8$ (课内

实验题目:基于单片机的智能送餐机器人设计
1. 课程简要信息
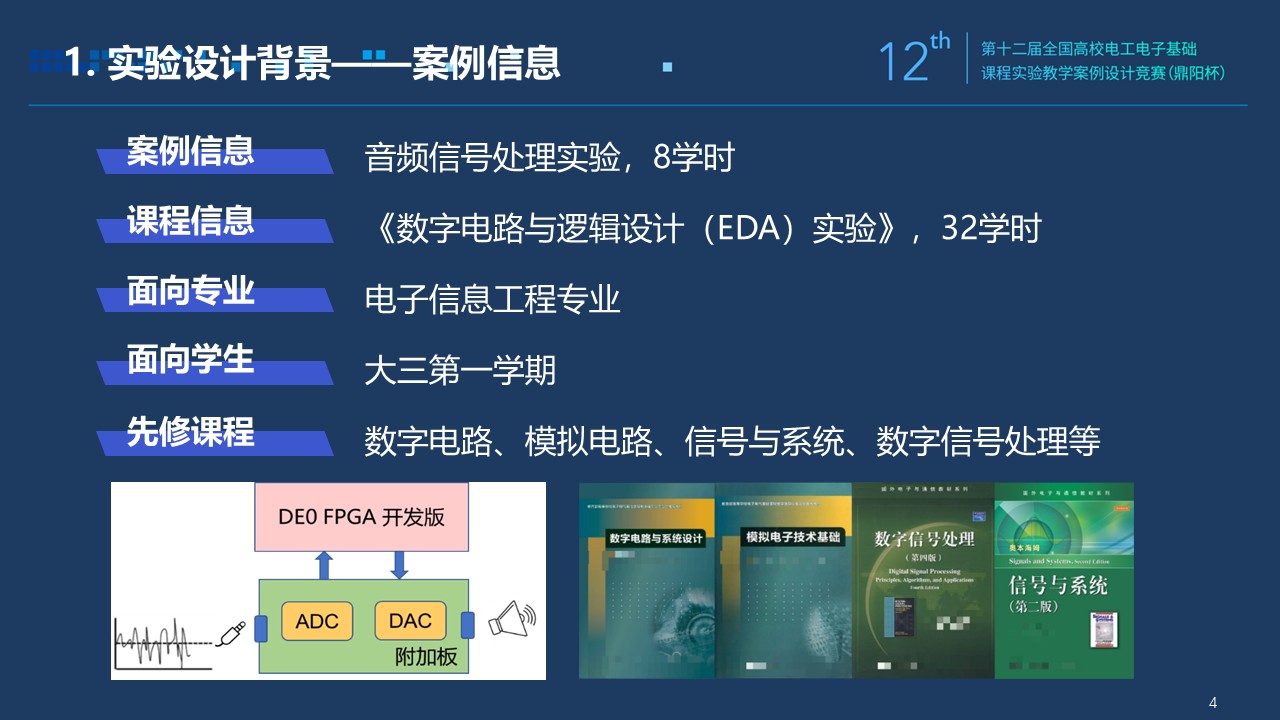
课程名称:单片机应用技术
课程学时:60
项目学时: $1 6 { + } 8$ (课内 $^ +$ 课外)
适用专业:电气自动化技术、智能控制技术、机电一体化
学生年级:高职二年级(4学期)
2. 实验内容与任务
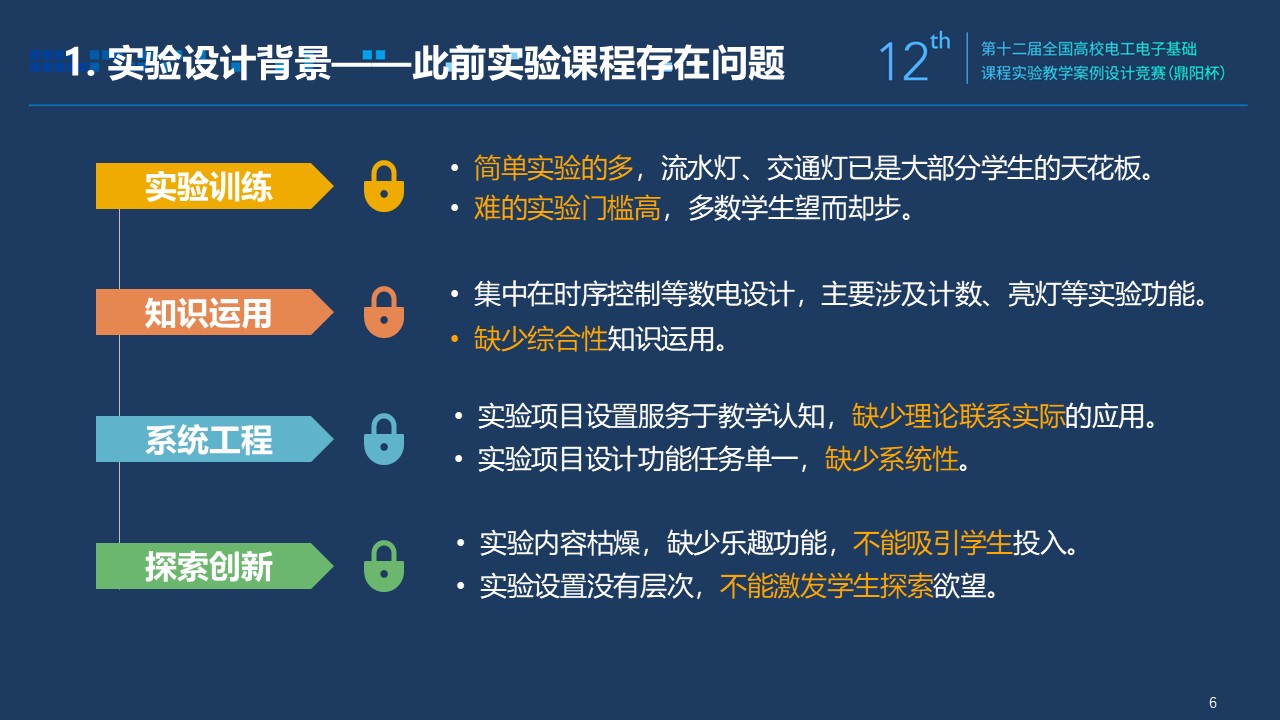
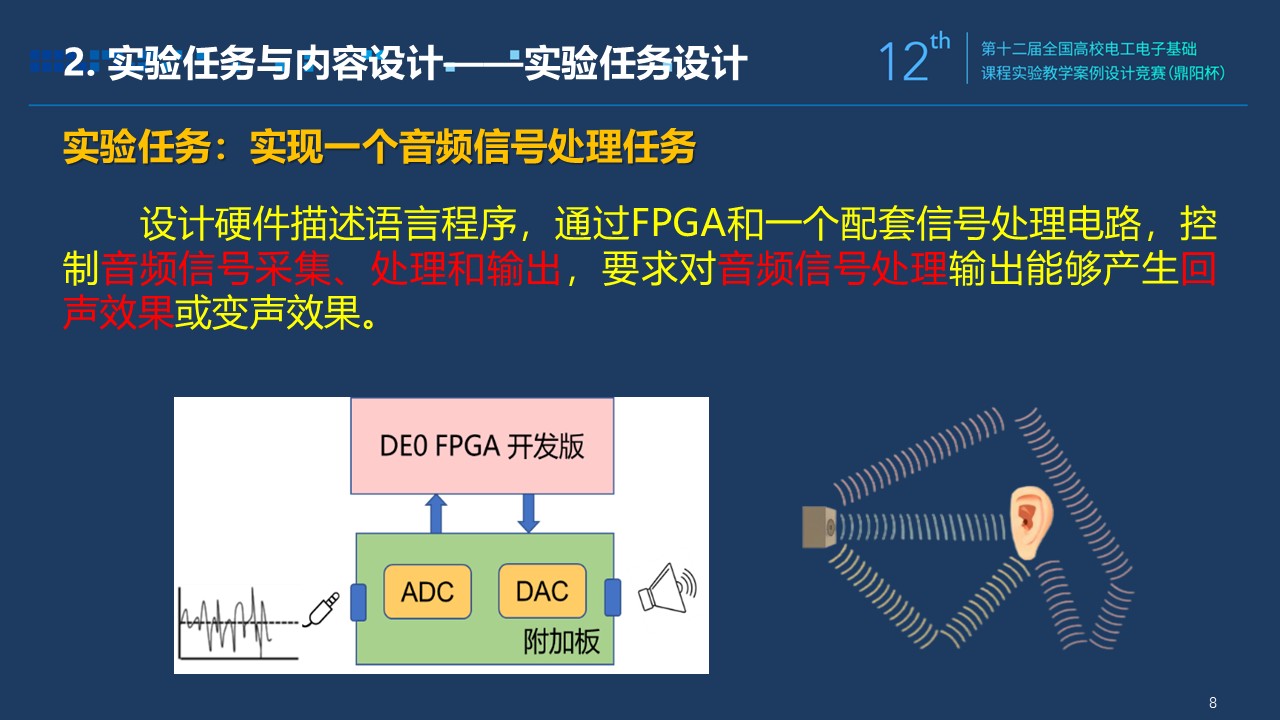
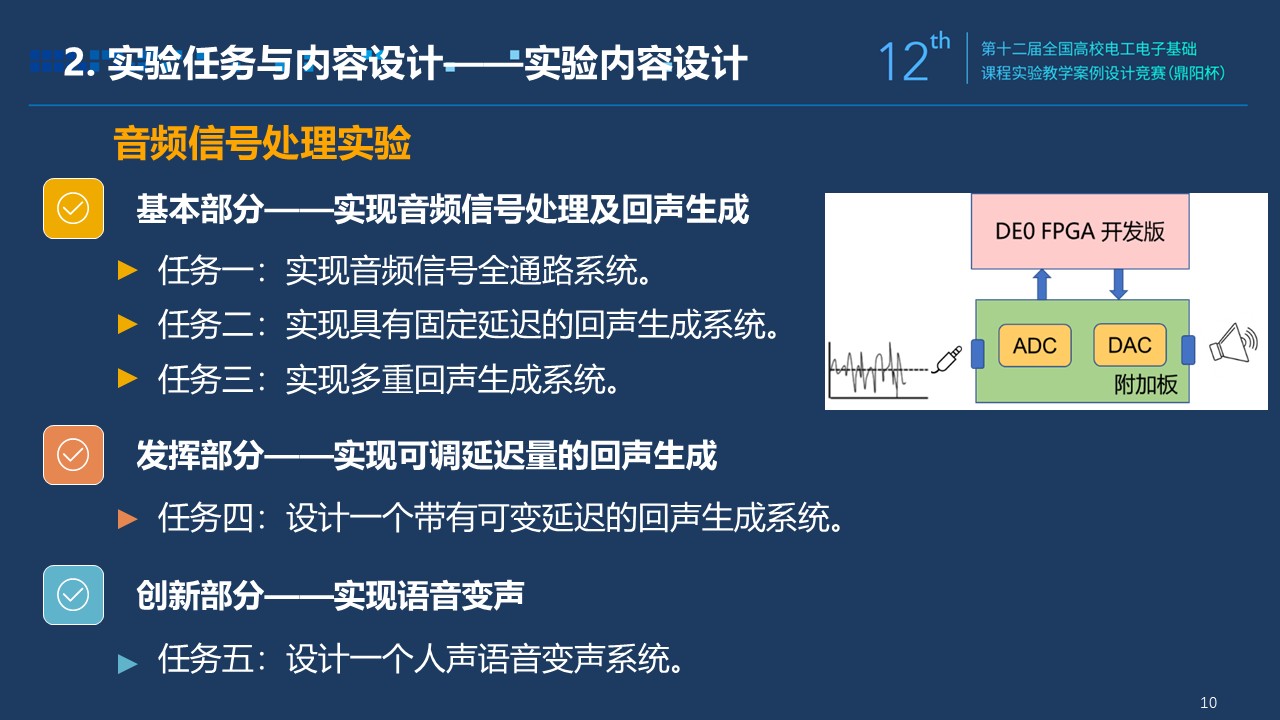
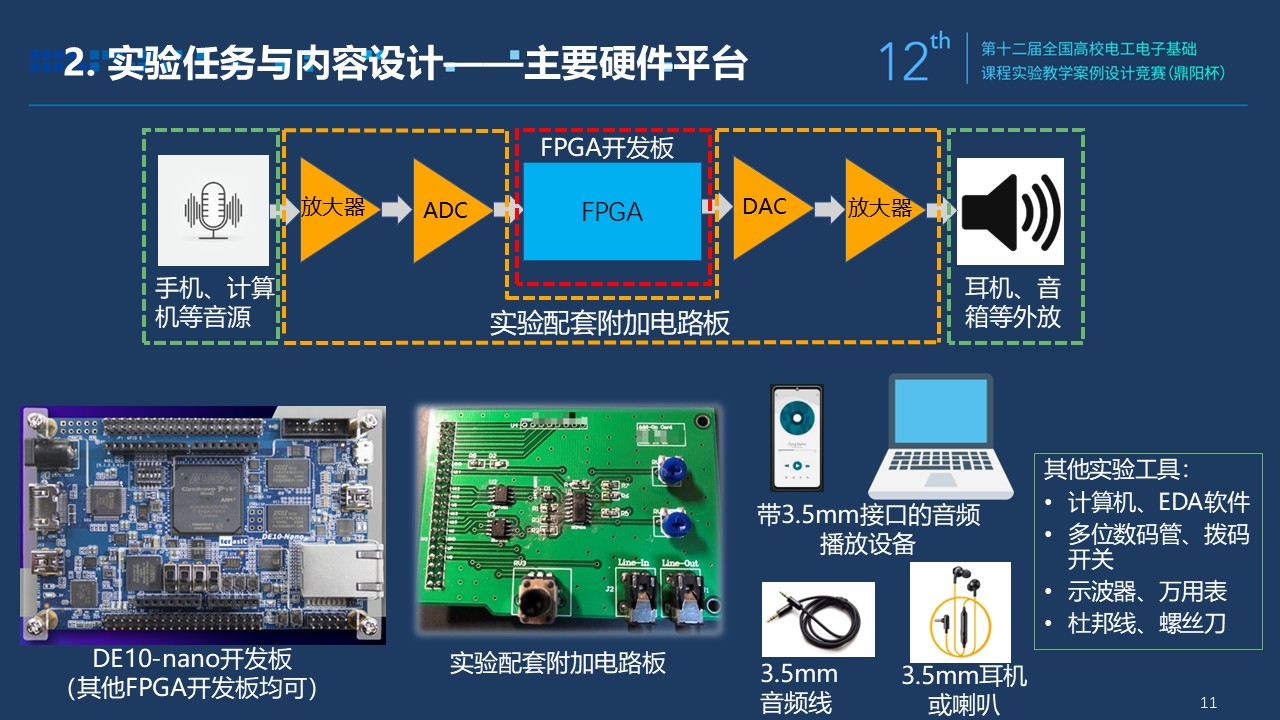
本实验项目以北京2022年冬奥会智慧餐厅中的“移动机器人”为切入点,以“科技冬奥”作为背景,使学生在感受冬奥会大量高科技手段和人工智能技术的同时,感受到北京冬奥向全世界展现的科技与人文完美结合的中国式浪漫,在激发学生强烈的民族自豪感与家国情怀的同时,触发学生的学习兴趣,引出本次任务要求:基于 STC89C52单片机,设计制作一个无人化自动送餐智能装置“智能送餐机器人”。该系统能够识别不同餐位进行蓝牙配餐服务,实现循迹导航并可发出相应的语音提示,具有液晶显示、电机调速、自动返回等功能。系统设计框架如图1所示:
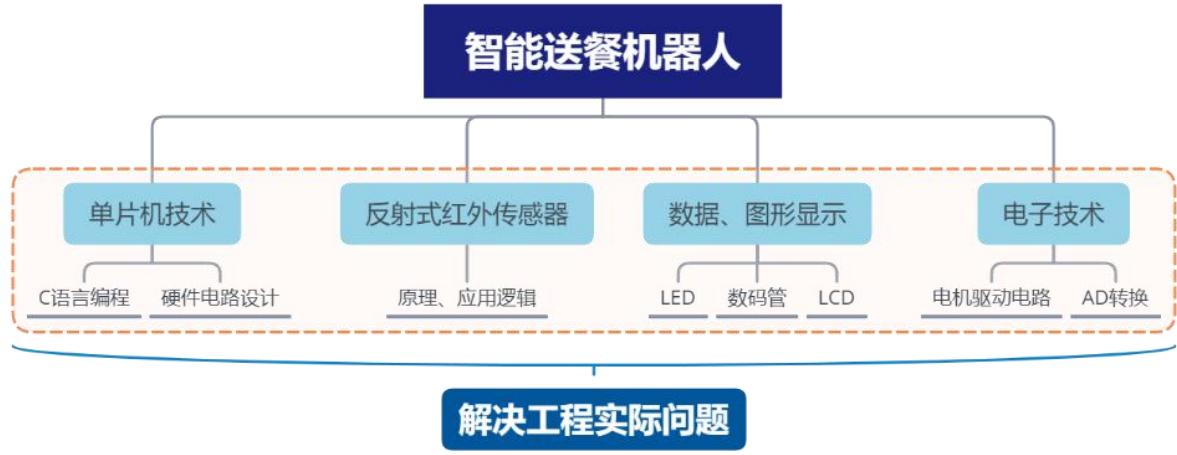
图 1 系统设计框架
(1) 基本要求
1)点餐功能:智能送餐小车有 3 个按键对应“菜单按键”、“菜品选择按键”、“确定菜品按键”,当送餐小车走到指定的餐位位置后,按下“菜单按键”后进入菜单页面,在菜单页面通过“菜品选择按键”和“确定菜品按键”进行点餐。
2)配餐功能:当点餐之后按下对应的餐位号按键即可确定点餐成功,点餐成功之后,小车会自动走到厨房,等待厨房备菜。
3)送餐功能:智能送餐小车上用 3 个按键代表不同的餐位“餐位1”、“餐位2”、“餐位3”,按下任意餐位按键之后,小车会自动从厨房走到指定的餐位。当厨房备完菜之后,按下点餐的餐位号按钮,小车就会自动走到对应的餐位号,到达指定的餐位后再次按下对应的餐位号按钮,表示送餐完毕;小车会自动返回厨房等待。
4)循迹功能:运用 5 个反射式红外传感器完成系统智能循迹功能,中间三个传感器进行自动循迹引导智能送餐机器人沿着轨道线行进,左右两侧传感器实现点配餐功能。
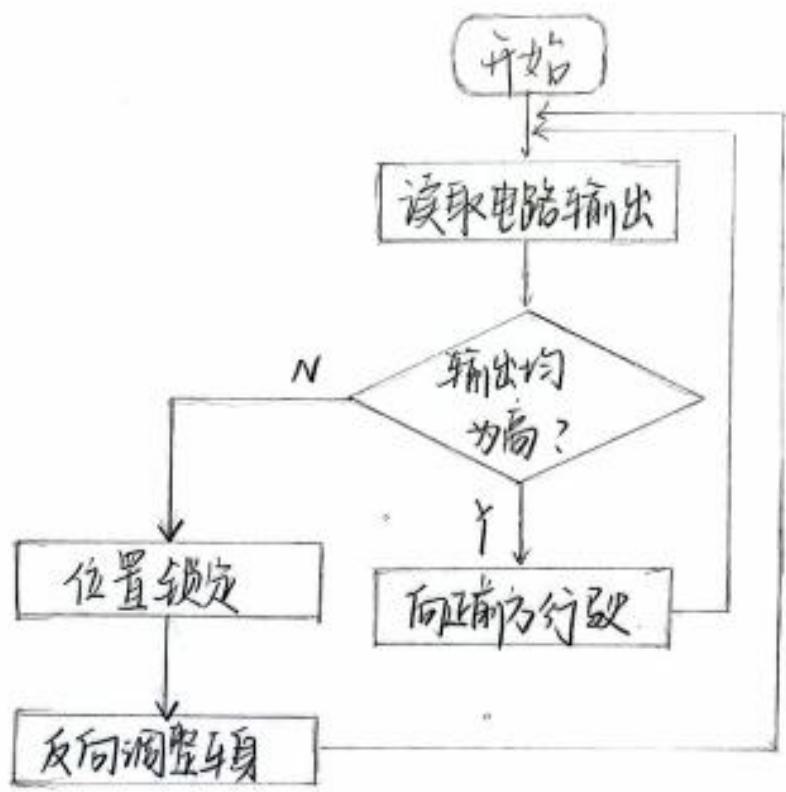
自动循迹功能时,中间三个传感器最中间的传感器起主要循迹作用,两侧传感器起辅助循迹功能,若机器人方向未与铺设的引导线路径产生偏离,则控制小车继续向前方行驶;若机器人已偏离轨迹线区域,则反向调整车身,进行修正;最右侧传感器识别三个餐位的位置,到达指定位置后完成点餐服务;
最左侧传感器检测厨房位置,到达厨房后机器人停止运动开始进行取餐,取餐完成后进行配餐服务;
取餐完成后,由最右侧传感器进行识别,将餐品送至指定的餐位。
智能送餐机器人循迹及点配餐功能示意图如图2所示:
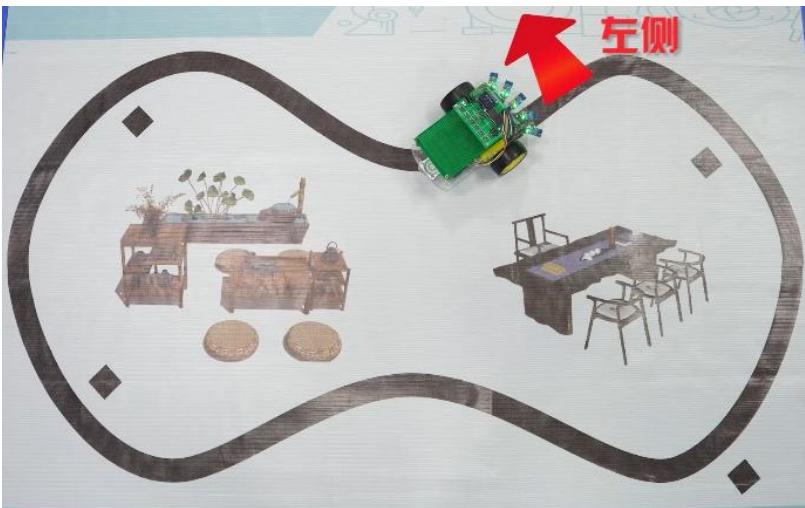
图 2 智能送餐机器人功能示意图
(2) 拓展要求
1)语音播报功能:增加智能送餐机器人语音提示功能,对点餐菜品进行语音报餐;
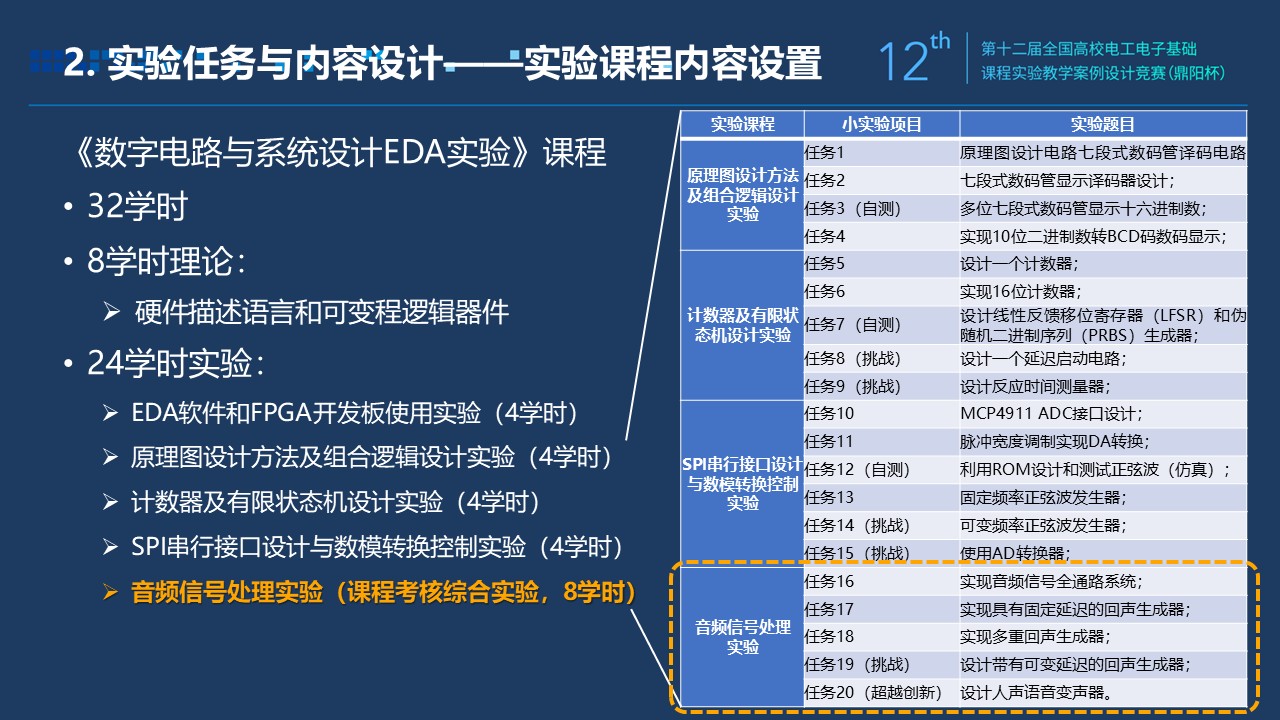
2)手机远程点餐:在安卓手机上安装蓝牙 APP(提供已有 APP),蓝牙 APP 界面上的6个按键替代智能送餐机器人上的六个按钮,实现手机远程呼叫点餐。手机APP界面如图3所示。

图 3 手机 APP界面
3. 实验过程及要求
-
掌握单片机基本工作原理和 C 语言程序设计应用基础;
-
运用单片机内部定时/计数器产生PWM 信号进行直流电机调速;
-
选择合适的直流电机驱动,运用L298驱动模块控制电机的启动、停止、正转;
-
学习反射式红外传感器的内部结构及工作原理;
-
掌握反射式红外传感器在智能送餐机器人循迹功能及点配餐过程中的应用逻辑;
-
对“智能送餐机器人”进行硬件电路设计;
-
针对系统功能进行软件设计,在实现“智能送餐机器人”基本功能的前提下,完成拓展功能;
-
在 Proteus 中进行系统的硬件电路及软件程序的仿真实现;
-
运用单片机实验箱进行“智能送餐机器人”的搭建与调试;
10)撰写设计总结报告,并通过分组演讲,分享交流不同解决方案的特点。
4. 相关知识及背景
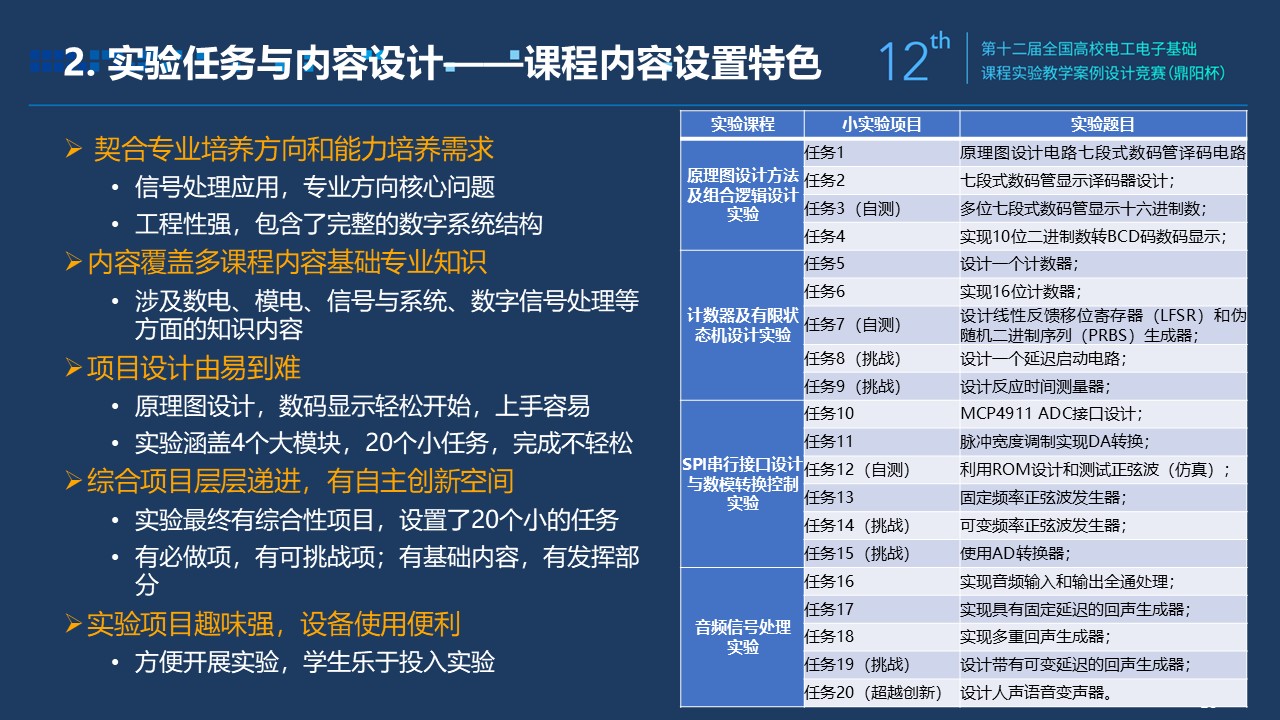
本实训在大二第二学期开设,学生已通过《电路分析》、《模拟电子技术》、《数字电子技术》、《C 语言编程》、《单片机应用技术》等前导课程的学习具备了一定的单片机项目实施能力。根据《单片机应用技术》课程测验结果,学生对单片机内部定时/计数器工作原理、C语言编程基本方法、Proteus仿真软件的使用等单片机应用基础知识和技能掌握较好,测验结果如图4所示:
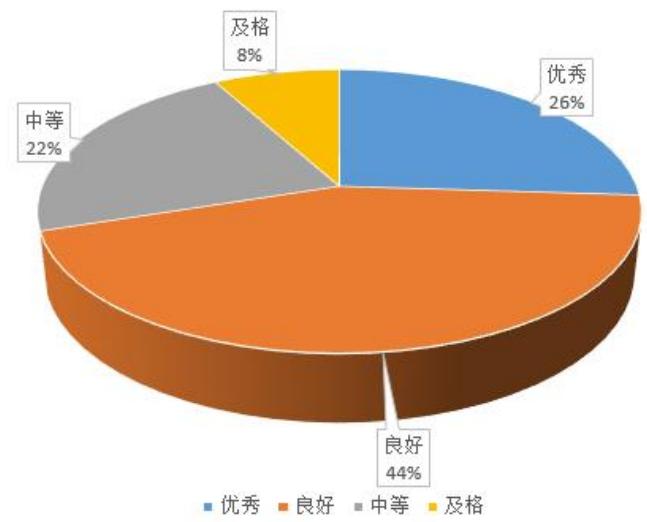
图 4 《单片机应用技术》课程测试结果
“智能送餐机器人”是运用单片机应用技术、数字和模拟电子技术解决现实生活和工程实际问题的典型案例,需要运用单片机定时/计数器、外部中断、PWM 调速、反射式红外传感器技术、液晶显示、语音模块等相关知识与技术方法;并涉及驱动模块使用、C51 编程、Proteus 硬件设计及仿真实现等工程概念与方法。
5. 实验环境条件
整个项目的实施在“集成电路技术实训室”中进行。在实训室中可完成“智能送餐机器人”实验项目相关理论知识的讲解,并且可利用 Proteus 软件进行软硬件设计及仿真实现,“集成电路技术实训室”如图5所示。

图 5 集成电路技术实训室
运用“LK-ED-II 电子设计制作云平台”学生可进行硬件电路的数据检测,数据可直接上传至云端,便于教师后台查看。利用仪器仪表完成“智能送餐机器人”的软硬件联调,获得实物。“LK-ED-II 电子设计制作云平台”如图6所示。

图 6 LK-ED-II 电子设计制作云平台
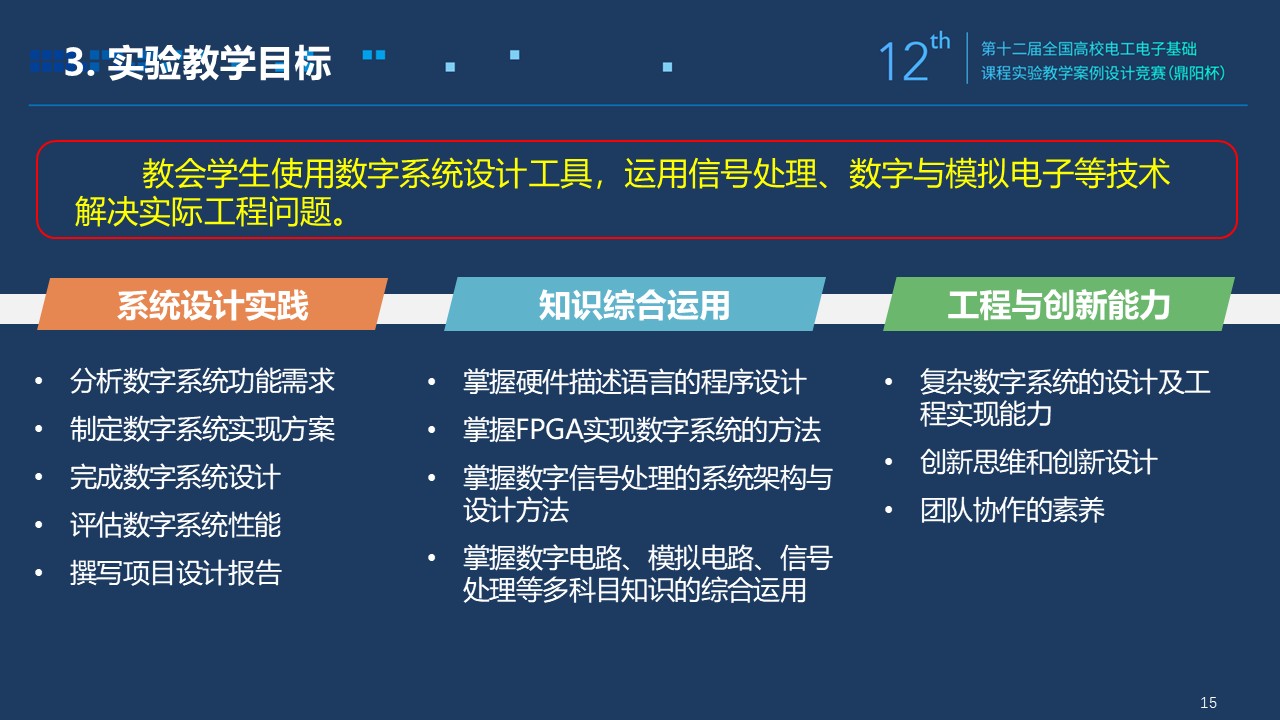
6. 教学目标与目的
依据课程标准、岗位需求及学情分析结果,在较为完整的工程项目实现过程中,引导学生掌握单片机内部资源的使用方法、数据显示方法、测量技术、传感器技术,实现方法的多样性及根据工程需求比较选择技术方案;引导学生根据需要选择元器件、设计电路、编写程序,构建仿真工程及调试,并通过仿真测试与分析得出项目的功能评价。从知识、技能、素养三方面确定了“智能行车轨迹辅助系统”实验项目的教学目标,如图7所示:
知识目标
- 理解反射式红外传感器内部结构及基本工作原理;2. 掌握反射式红外传感器在智能送餐机器人中的应用逻辑。
能力目标

图 7 项目教学目标
- 能够按照要求编写智能送餐机器人的循迹及点配餐程序;2. 能够正确设计并调试反射式红外传感器的硬件电路。
素质目标
- 具备举一反三的编程思维能力;
- 具备自主探究和故障排除的能力;
- 遵守排故操作规范,养成严谨认真的工匠精神。
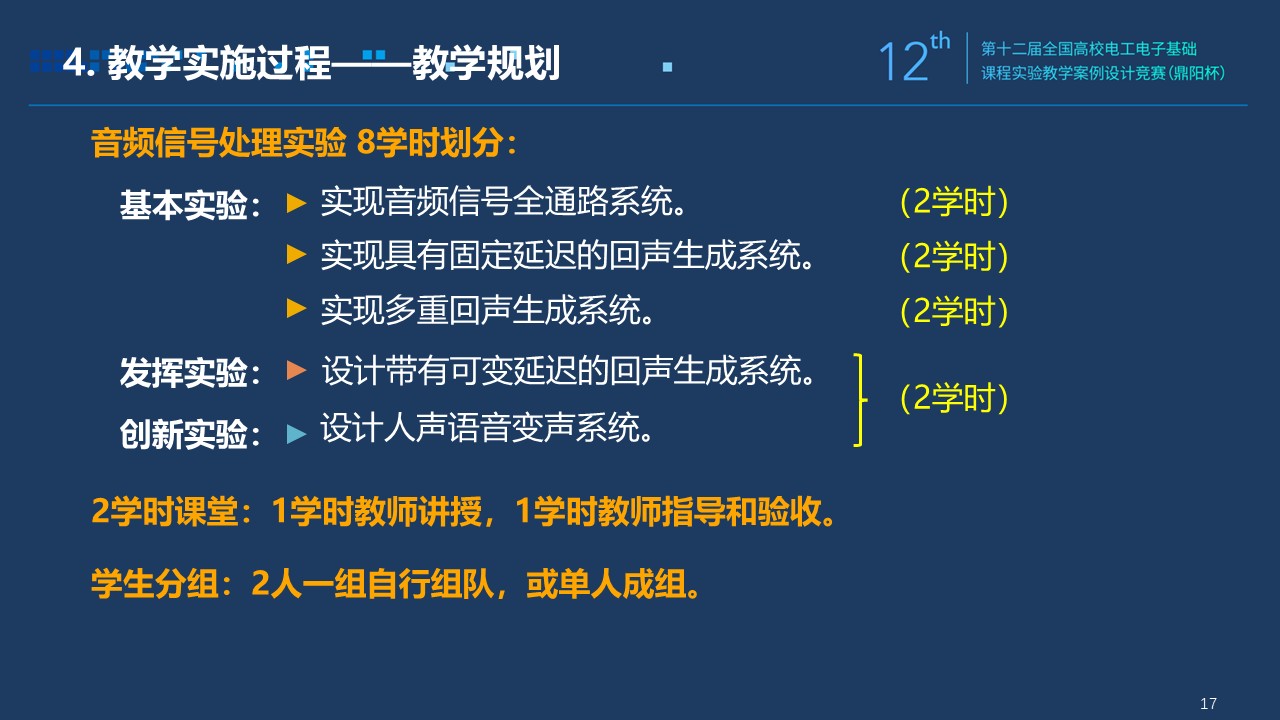
7. 教学设计与实施进程
(1)教学设计
“智能送餐机器人”以实际单片机工程应用项目为载体,模拟单片机工程应用开发流程,将安全规范生产贯穿课堂始终。
教学过程包括“课前预习与测试”、“课中学练”以及“课后拓展”三个模块。采用任务驱动教学法,灵活运用智慧职教云平台、 Proteus虚拟仿真软件、实时投屏播放、操作过程录制等信息化手段。
依据专业教学标准、人才培养方案、课程标准及岗位工作任务设计了“导 $\twoheadrightarrow$ 析 $\twoheadrightarrow$ 仿 $\twoheadrightarrow$ 调 $\twoheadrightarrow$ 评 $\twoheadrightarrow$ 研”六环节的教学活动,充分体现“学生为主体,教师为主导”的教
学理念。
融入新时代职业素养,将典型单片机技术与工程实际应用相结合,将虚拟仿真和真实操作有效融合,将职业素养和岗位技能积累贯穿始终。“智能送餐机器人”实验项目具体教学设计如图 8所示:
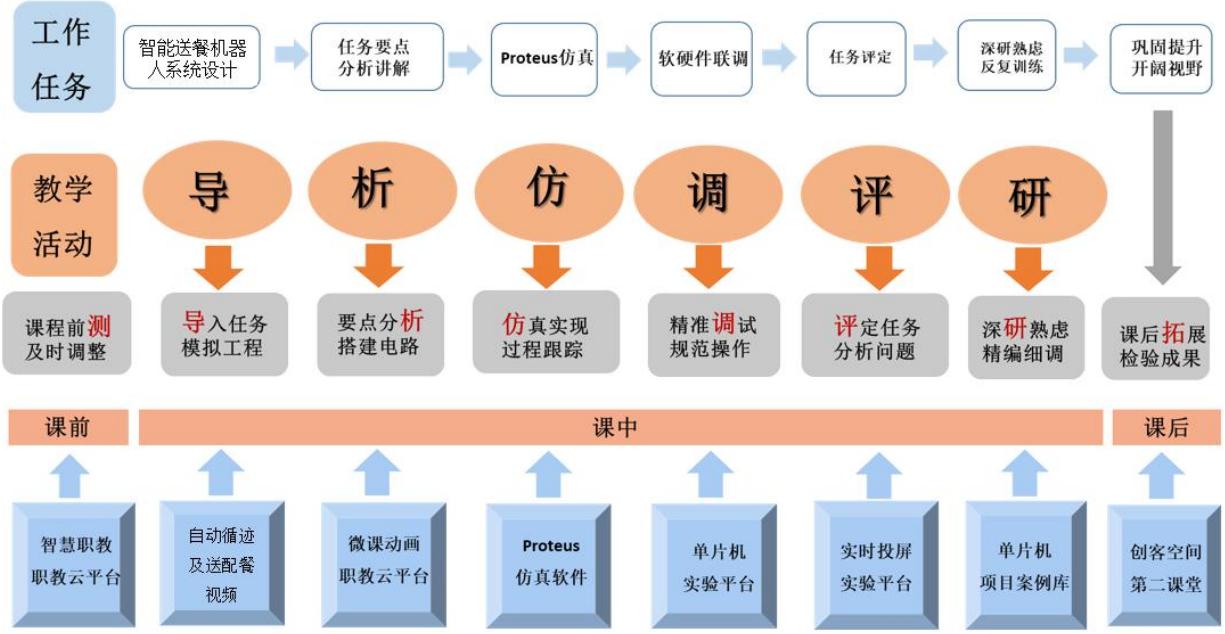
图 8 “智能送餐机器人”教学设计
(2)教学实施进程
“智能送餐机器人”实验项目的教学实施进程包括“课前预习与测试”、“课中学练”以及“课后拓展”三个模块。依据“学生为主体,教师为主导”的教学理念设计了“导 $\twoheadrightarrow$ 析 $\twoheadrightarrow$ 仿 $\twoheadrightarrow$ 调 $\twoheadrightarrow$ 评 $\twoheadrightarrow$ 研”六环节的教学活动。
课前测试
学生在智慧职教云平台上完成单片机相关基础知识测验,教师根据测试结果对个别学生进行线上辅导。随后发布学习资料和任务单,布置课前需完成的任务,通过学生的完成情况及时调整教学策略。
课中学练
“智能送餐机器人”实验项目包括电机调速模块设计、自动循迹功能模块设计、语音提示模块设计、液晶显示模块设计四个任务,各任务教学过程分为三个阶段。
阶段一
任务引入
引入北京冬奥会中大量高科技手段和人工智能技术,展示中国科技创新成果的综合运用。结合“智能送餐机器人”应用实例,分析各模块设计任务单,各小组代表阐述前
期任务完成情况,教师点评并进行深入分析,帮助学生找到问题根源和解决方法,有效激发学生的学习兴趣。
阶段二
任务实施
通过“任务要点分析”、“Proteus 虚拟仿真”、“软硬联调”、“深研熟虑”四个环节,实现全体学生运用单片机技术实现“智能送餐机器人”的实际操作技能。
环节一 任务要点分析
分析基于“中国芯”的智能送餐机器人系统组成及功能。利用可视动画演示讲解反射式红外传感器内部结构及工作原理,在此基础上,深入讲解反射式红外传感器在智能送餐机器人中实现循迹功能及自动点配餐的应用逻辑。
此环节目的是使学生运用单片机知识来实现工程应用,将知识的理解转化为技能的掌握,通过实物演示、动画、微课等方法,将抽象的编程语言具象化,直观呈现单片机编程指令的工作原理。任务要点分析如图9所示:
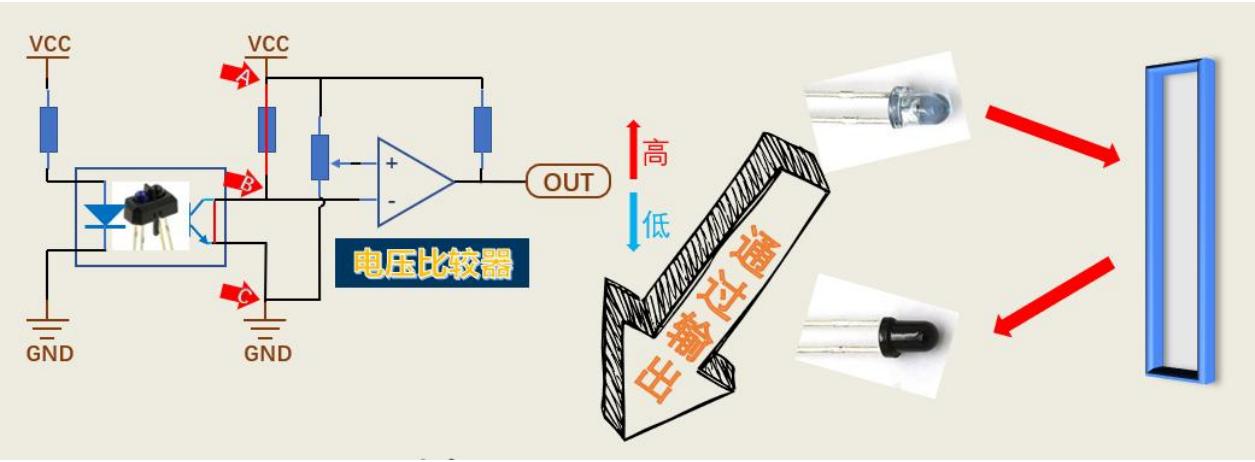
图 9 任务要点分析
环节二
Proteus 虚拟仿真
利用流程图结合送餐机器人功能动画完成智能送餐机器人循迹及点配餐功能的软硬件设计,并且完成仿真操作。
此环节目的是使学生掌握单片机项目的开发步骤,利用单片机智能仿真软件PROTEUS,学生进行硬件设计、编写程序。节约教学成本、保证操作安全、提高教学效率.虚拟操作训练如图 10所示:

图 10 虚拟仿真操作训练
环节三
软硬联调
软硬联调是单片机项目开发的核心任务,影响任务完成的全过程。教师利用悬臂监控云台实时演示软硬联调的操作方法,分小组完成软硬联调及排故操作,利用“LK-ED-II电子设计制作云平台”实时记录学生端检测数据并上传至教师端,教师随时查看各组“云端”数据,及时给予指导,对平台大数据统计得出排查频率较高的故障进行着重强调,使学生掌握软硬联调的操作技能。学生软硬联调操作训练如图11所示:
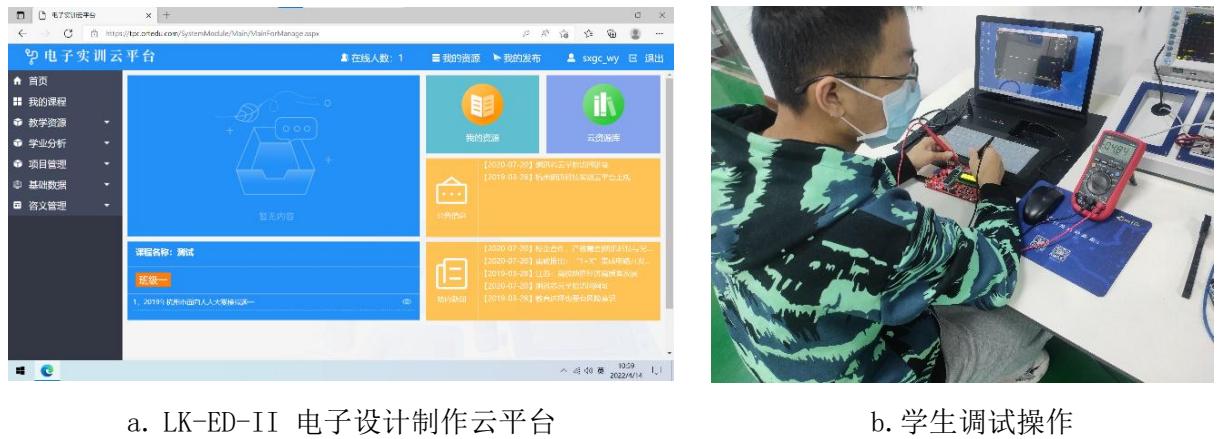
图 11 联调操作训练
环节四
任务评定
各小组针对各自的实施情况完成实验报告并进行汇报分享,依据任务完成情况进行自评与互评;教师评价贯穿教学全过程,融合实验报告、课前测试、小组讨论等多元考核方式。任务评定如图 12所示:
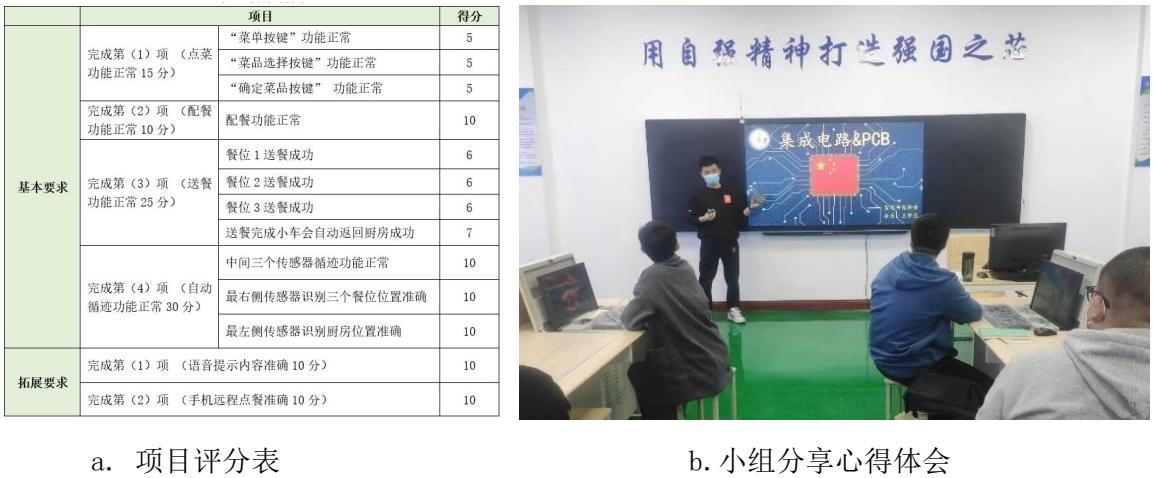
图 12 任务评定
阶段三
任务优化
针对已实施的任务进行深研熟虑,优化操作,全班学生作为一个整体,每一小组作为一个单元共同合作,查阅资料、研讨方案、制定修改措施,提高团队合作能力。此环节目的是锻炼学生学习分析、解决问题能力以及创新能力。
课后拓展
课后学生在“单片机创意工作室”对“智能送餐机器人系统”进行功能优化、升级,制作出完善的作品;引导学生对反射式红外传感器功能进行延伸,发挥想象力,大胆创新,将反射式红发传感器创新应用于其他领域。学生制作的“智能送餐机器人”实物如图13所示:

图 13 “智能送餐机器人”实物
师生共同参与全国大学生电子竞赛、技能大赛、创新创业大赛及校企合作项目,融入企业生产元素,通过企业导师和校内教师共同教研,提高学生的创新能力。
8. 实验原理及方案
(1)系统结构
智能送餐机器人系统结构框图如图14所示:
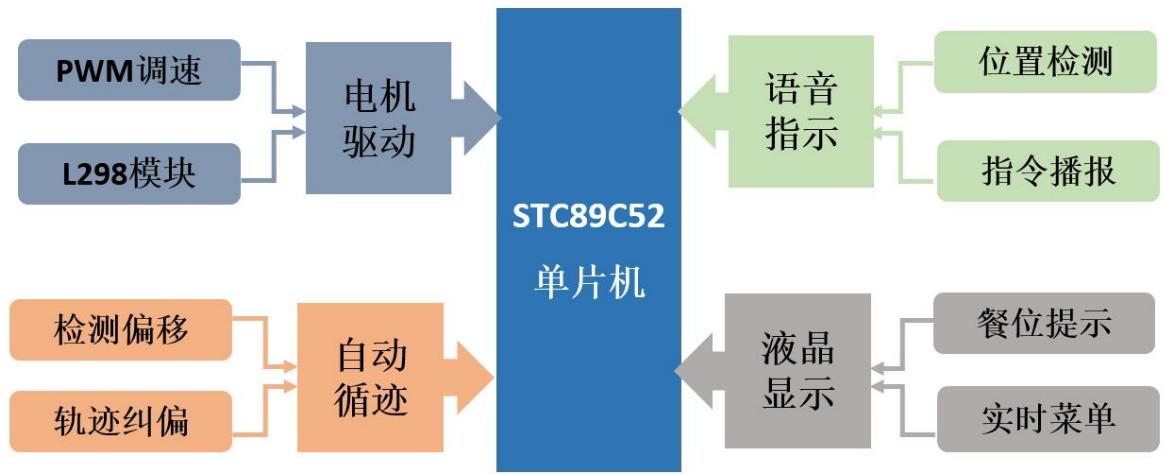
图 14 智能送餐机器人系统结构
(2)实现方案
智能送餐机器人系统采用反射式红外传感器TCRT5000检测机器人的轨迹状态;单片机读取传感器电路输出的高低电平,判断机器人行动轨迹状态(是否发生轨迹偏移、是否到达餐位或厨房);然后进行直流电机 PWM 调速(直流电机采用L298驱动、运用单片机内部定时器产生 PWM信号)对机器人进行轨迹纠偏或停止运动进行点配餐服务,通过蓝牙APP可进行远程点餐,OPT定制芯片完成相应语音提示。
智能送餐机器人系统实现方案框图如图15所示,系统电路如图16所示:
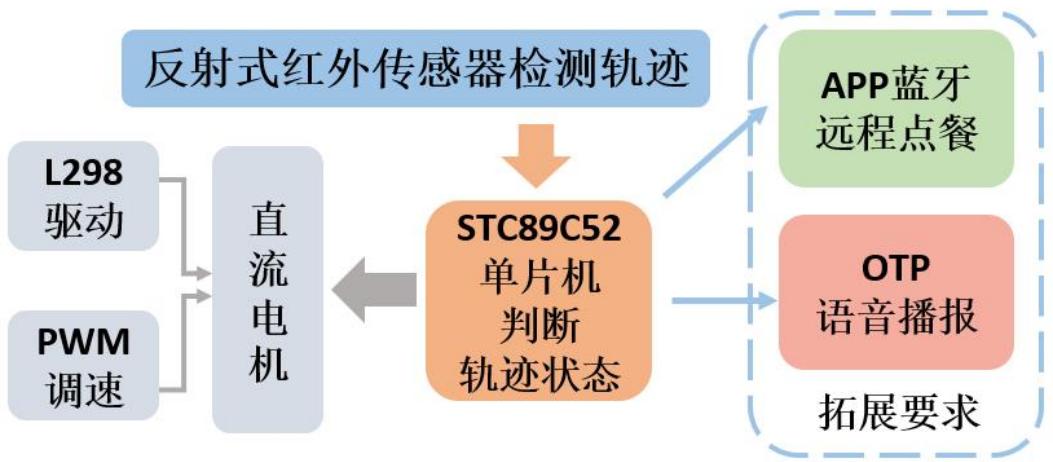
图 15 智能送餐机器人系统实现方案
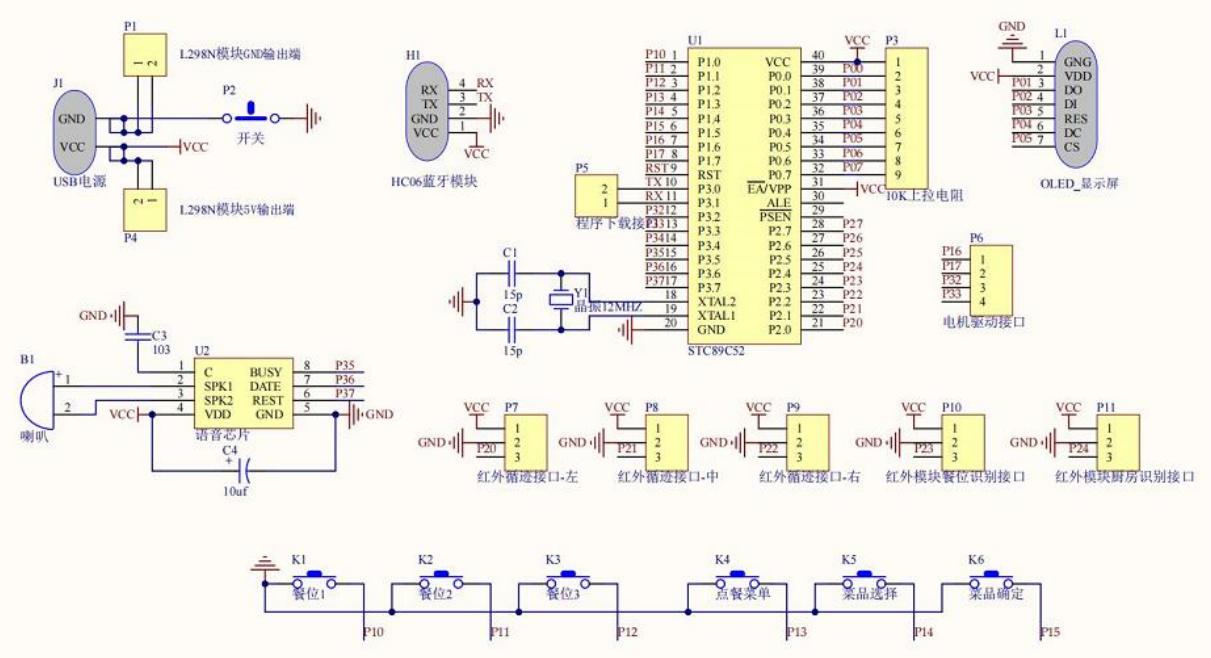
图 16 智能送餐机器人系统电路
9. 实验报告要求
实验报告需要反映以下工作:
1)实验项目需求分析及任务要点实现方案论证;
2)硬件电路设计与元件选择;
3)程序设计流程图及主要程序代码;
4)软硬联调测试方法;
5)实验数据记录及数据处理分析;
6)实验结果总结。
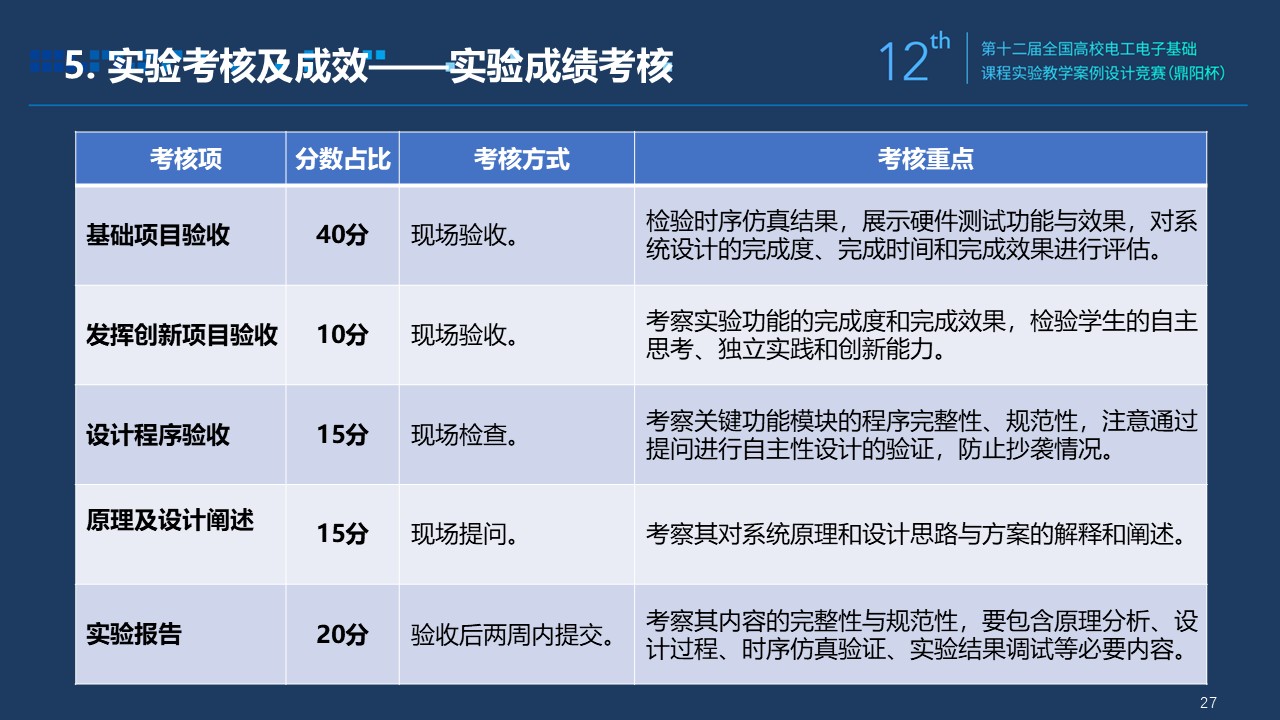
10.考核要求与方法
考核评价伴随整个教学过程,线上评价与线下评价相结合,教师评价与学生评价相结合,小组自评与组间互评相结合,根据各阶段考核得出学生综合考评,反馈教学效果,优化教学策略。考核评价权重如图 17所示:
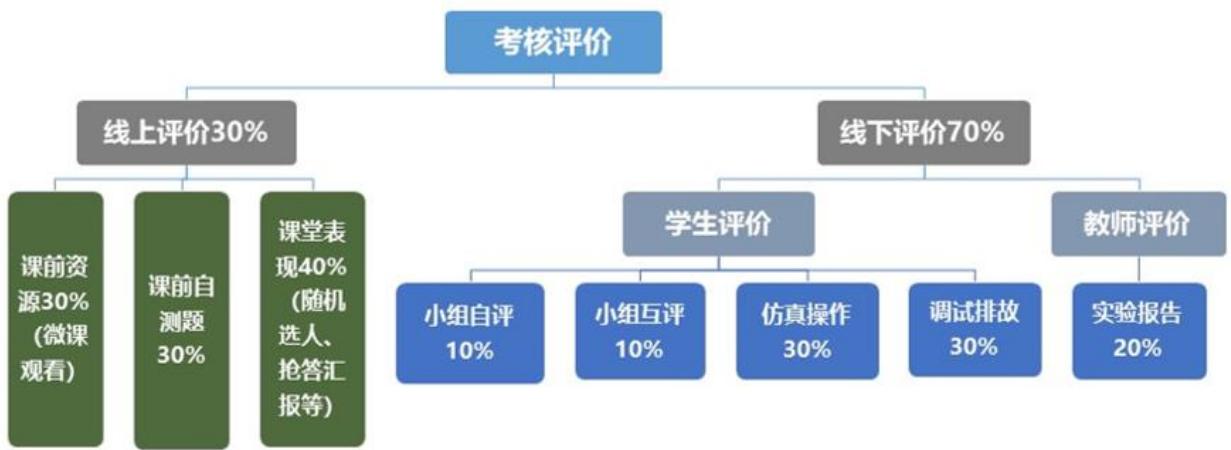
图 17 考核评价权重
小组自评与组间互评依据项目评分表进行评价打分,如表1所示:
表 1 项目评分表
| 项目 | 得分 | ||
| 基本要求 | 完成第(1)项(点菜功能正常15分) | “菜单按键”功能正常 | 5 |
| “菜品选择按键”功能正常 | 5 | ||
| “确定菜品按键”功能正常 | 5 | ||
| 完成第(2)项(配餐功能正常10 分) | 配餐功能正常 | 10 | |
| 完成第(3)项(送餐功能正常 25分) | 餐位1送餐成功 | 6 | |
| 餐位2送餐成功 | 6 | ||
| 餐位3送餐成功 | 6 | ||
| 送餐完成小车会自动返回厨房成功 | 7 | ||
| 完成第(4)项(自动循迹功能正常 30 分) | 中间三个传感器循迹功能正常 | 10 | |
| 最右侧传感器识别三个餐位位置准确 | 10 | ||
| 最左侧传感器识别厨房位置准确 | 10 | ||
| 拓展要求 | 完成第(1)项(语音提示内容准确10分) | 10 | |
| 完成第(2)项(手机远程点餐准确10分) | 10 | ||
11. 项目特色创新
“智能送餐机器人”实验项目以实际单片机工程应用为载体,模拟单片机工程开发流程,将安全规范贯穿课堂始终。合理使用多种信息化手段,利用PROTEUS智能仿真系统,配合“LK-ED-II 电子设计制作云平台”,打破传统单片机教学对时间、空间、设备的要求,避免实际电路搭建中元件易损耗、检测设备昂贵的弊端,降低教学成本,提高学习效率。
不仅如此,本实验项目实施过程中还将隐性思政元素与显性专业知识有机融合。引入社会热点“新事件---科技冬奥”隐形思政内容进课堂,与送餐机器人项目中用到的显性专业知识相结合,引导学生牢固树立崇高的理想信念,增强中国特色社会主义道路自信、制度自信、理论自信、文化自信,厚植爱国主义情怀。
同时,将科技创新思维融入专业课程中,引入北京冬奥科技创新案例进课堂,引导学生用已学的专业知识去解决实际问题,激发学习专业知识兴趣的同时,触发学生的创新意识以及科技强国的理念。
整个实验过程秉承学生为主体,教师为主导,师生共同提升的教学理念,以实践为导向,项目为依托,使学生职业能力与教师专业技能得到双提升。同时,对接电子工程师岗位能力要求,辅助学生掌握单片机应用开发方法,规范学生操作行为,在教学和实际应用中具有可推广性。
附件:实验报告
山西工程武業学院
实训实验报告
基于单片机的智能送餐机器人
学生姓名:張永月指导教师姓名:中玉玲学生班级:电气2001班
2022年3月
实验组成员:刘医源于大海
以小组合作的形式,对给定项目进行功能分解、需求分析与设计、运用仿真软件和编程软件进行电路搭建和程序设计,最终完成智能送餐机器人的设计任务,并提交
实验步骤:
1、任务功能分解;
2、需求分析与设计:
3、完成硬件电路设计:
4、完成软件设计:
5、使用实验箱完成软硬件联调,测试项目系统功能。
三、设计过程
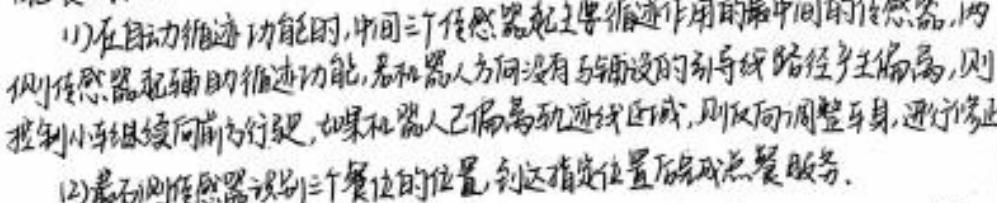
运用5个反射式红外传感器完成送餐功能,中间三个传感器进行自动循迹引导机器人沿轨道线前进,两则传感器实现点配餐功能。
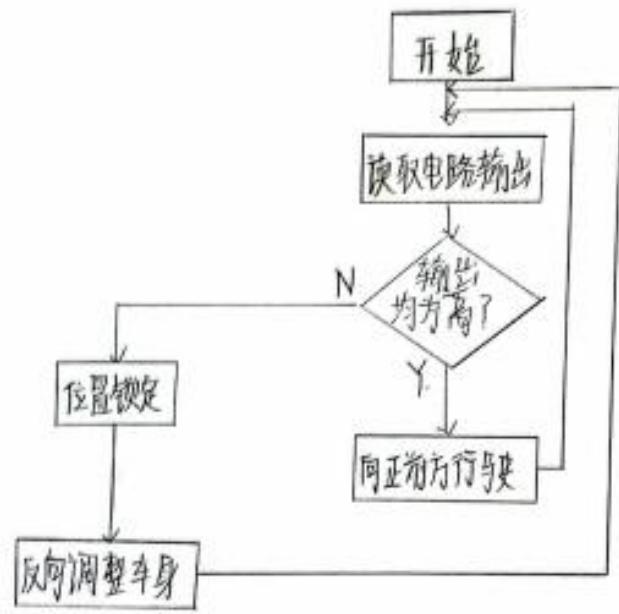
(一)在执行自动循迹,功能时,中间三个传感器中最中间的传感器起主要循迹作用,两侧传感器起次要僑迹功能,若机器人方同与铺设的引导线路产生偏离,则反同调整车身,进行修正;若机离人未偏离轨迹线,则控制车继续行驶。
二最右侧传感器识别餐位位置,到达指定位置后完成点震服务。
(三)最左侧传感器检测厨房应置,到达厨房后机器人开始进行取餐,
(四)取餐完成后,最右刻店感器说别餐应应置,将起送到指定餐应
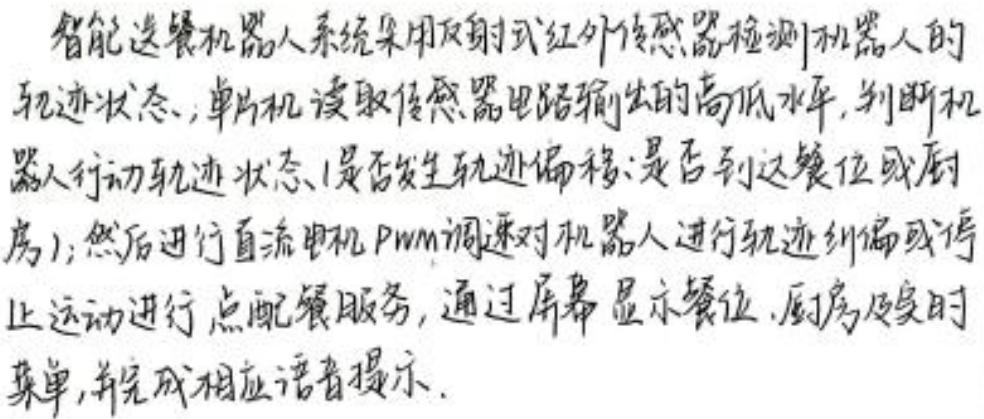
错能送餐机器人采用反射式红外传感器检测机骂人的执迹状态;单片机读取传感器电路输出的高底电平,判断机器人是否发生轨迹偏移、是否到达餐位或厨房;然后直流电机PWN调整速度对机器人进行轨迹纠偏或停止运动进行点配餐服务,通过屏幕显示餐位、厨房及菜卑,并且完成相应语音提示。
(三)硬件电路设计(包括原理图和元器件选型)
1、原理图:
| 测试内容 | 结果 | ||
| 基本功能 | 第(1)项中间三个传感器自动循迹功能 | 中间传感器循迹功能 | 正常 |
| 两侧传感器辅助循迹功能 | 正常 | ||
| 第(2)项最右侧传感器检测餐位位置功能 | 餐位1位置检测 | 异常 | |
| 餐位2位置检测 | 正常 | ||
| 餐位3位置检测 | 正 | ||
| 第(3)项最左侧传感器检测厨房位置功能 | 异 | ||
| 拓展功能 | 第(1)项语音提示功能 | 正常 | |
| 第(2)项液晶显示功能 | 正常 | ||
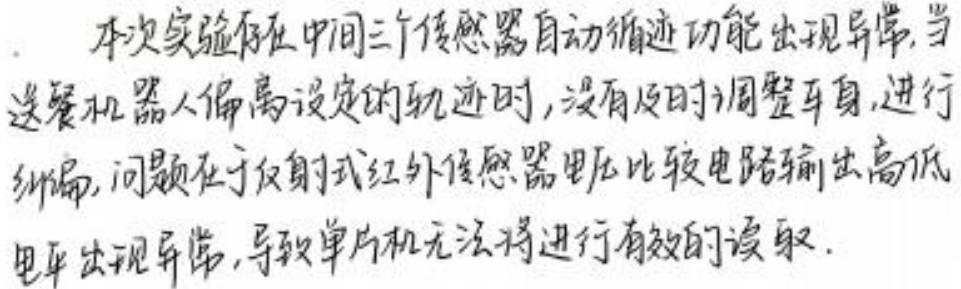
四、实验结果总结(本次实验成败之处及其原因分析)
本次实验存在餐位1位置检测从及厨房应置检测异常情况,原因在于编程出现错误,导致机器人无法识别餐位1及厨房黑块,使单片机无法驱动直流电机停止到餐位1及厨房位置。
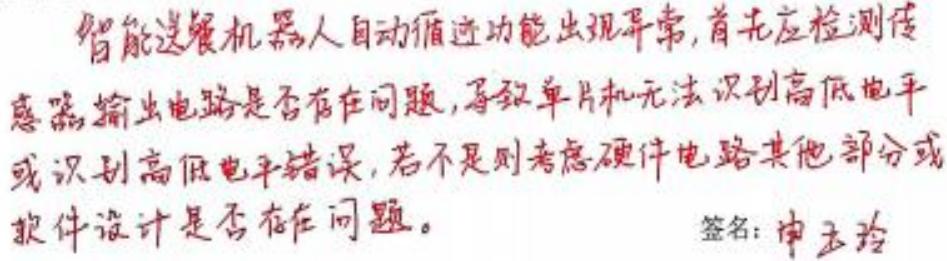
指导老师评语及得分:
学未设计的智能送餐机器人在识别餐应及厨房位置发生错误,若硬件电路设计有问题,应仔细检查缩写的程序是否存在错误,寻致单片机指令出错,未实现预设的功能

2022年3月29日
山西工程武業學院
实训实验报告
基于单片机的智能送餐机器人
学生姓名:王佳指导教师姓名:中玉玲学生班级:电气2001旺
实验组成员:刘赤年张能能
通过智能送餐机器人系统的设计,运用单片机应用技术、数字和模拟电子技术解决现实生活和工程实际问题的典型案例,进一步掌握单片机定时/计数器、外部中断、PWM调速、反射式红外传感器技术、液品显示、语音模块等相关知识与技术方法,以及驱动模块使用、C51编程、Proteus硬件设计及仿真实现等工程概念与方法。在项目设计中提高实际动手能力、相互协作能力。
以小组合作的形式,对给定项目进行功能分解、需求分析与设计、运用仿真软件和编程软件进行电路搭建和程序设计,最终完成智能送餐机器人的设计任务,并提交实验报告。
实验步骤:
1、任务功能分解;
3、完成硬件电路设计;
5、使用实验箱完成软硬件联调,测试项目系统功能。
三、设计过程



(三)硬件电路设计(包括原理图和元器件选型)
1、原理图:
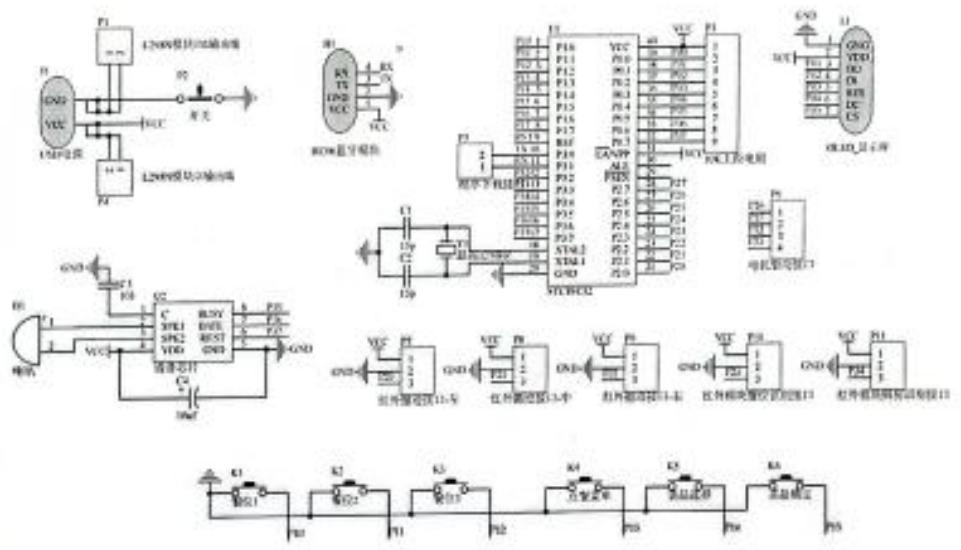
2.元器件选型
1单片机:STC89c52单片机
12)反射式红外传感器TCRT5000
13)自流电机:∠298驱动.PWm调整速度
14)液晶显示:OLED屏幕
(5)语音提示:OPT定制芯片.
(四)软件设计
| 测试内容 | 结果 | ||
| 基本功能 | 第(1)项中间三个传感器自动循迹功能 | 中间传感器循迹功能 | 异常 |
| 两侧传感器辅助循迹功能 | 异常 | ||
| 第(2)项最右侧传感器检测餐位位置功能 | 餐位1位置检测 | 正常 | |
| 餐位2位置检测 | 正常 | ||
| 餐位3位置检测 | 正常 | ||
| 第(3)项最左侧传感器检测厨房位置功能 | 正常 | ||
| 拓展功能 | 第(1)项语音提示功能 | 正常 | |
| 第(2)项液晶显示功能 | 正常 | ||
四、实验结果总结(本次实验成败之处及其原因分析)
指导老师评语及得分:
2022年3月29日