
智能派送小车控制器设计
实验题目:智能派送小车控制器设计
1.课程简要信息
课程名称:设计与建造丨
课程学时:课内8学时、课外8学时
适用专业:“未来智能机器与系统”平台(电子科学与技术、自动化、人工智能、智能制造)
学生年级:大一1学期
2.实验内容与任务(限500字,可与“实验过程及要求”合并)
(一)基本任务:
1)设计智能快递派送小车的控制系统,小车携带3个包裹从出发区发车,跟随地面轨迹线自主驶向终点后停止,途中在指定位置完成包裹的投放任务;
2) 赛道长3米,宽1.5米;场地背景为白色,所有标记线为黑色,线宽 $2 0 \mathrm { m m }$ ;出发区范围 $3 0 0 \mathrm { m m }$ $\times 3 0 0 \mathrm { m m }$ ;投放区由十字线标识;
3) 以Arduino 控制器为核心,选用适当的传感器、直流减速电机、驱动器、伺服舵机、电源、面包板、电子元件等完成控制系统硬件;
4) 设计控制器软件,完成循迹、包裹投放、自动启停等功能,实现完整的自主控制;
5)课程结束时各团队携带设计成果现场演示,并完成研制报告和答辩。
(二)扩展任务:
1)增加交互功能,在投递完成后提示用户及时取走包裹。
2)组队携带小车参加竞赛,以小车任务完成情况、运行时间和设计成本作为竞赛评分依据。
3.实验过程及要求(限300字)
1) 查阅资料,了解循迹、调速、舵机的工作原理和控制方法、Arduino 的开发;
2) 预习红外光电传感器、编码器、直流减速电机、舵机的原理;
3) 选择元器件,注意传感器类型、信号形式、电机的控制方式;设计控制系统接线原理图;
4) 设计程序算法,并在Arduino IDE中编写完成控制程序;
5) 连接、组装控制系统,完成功能模拟测试。通过打印信息观察传感器读数、变量等;
6) 将控制器安装到智能派送小车上进行整体联调,在场地上完成规定动作,观察传感器、执行
器、控制器的参数效果;
7) 撰写实验总结报告,组织答辩环节,演讲交流不同的实现方案。
8) 思考与讨论:怎样确定传感器灵敏度、电机速度、转向角度、投递定时等参数,使小车可靠
性和效率达到最优?
4.相关知识及背景(限150字)
这是一个运用数模电路和单片机技术解决工程实际问题的典型案例,需要运用传感器及检测技术、数据转换、反馈控制、电机调速、伺服控制等相关知识与技术,还需要了解单片机控制系统的组成、原理、编程、调试等知识。涉及了总体方案设计、电路设计、程序设计、系统实施、调试等完整工程实践环节。
5.教学目标与目的(限100字)
通过智能派送小车控制器设计这一综合性、实践性项目,让大一新生快速掌握以单片机为核心的电控系统设计与实现技术,运用传感器、电机、自动控制等学科知识,培养学生自主学习、自主设计和工程实践能力,激发创造力。
6.教学设计与引导
本实验是一个综合性的工程实践项目,教学过程包括课前预习、课堂知识讲解、方案研讨、系统搭建、软件设计、综合调试、总结答辩等内容。在此起期间,重点从以下方面加强对学生的引导:
1)在学习开始前,给每个小组分发 Arduino控制器、面包板、元器件、红外循迹传感器、直流减速电机、舵机等,让学生尽早接触控制器部件的实物并开始熟悉,建立感性认识提高兴趣。
2)预习阶段布置学习任务,通过网站资源、图书文献等渠道,了解 Arduino 的软硬件开发、红外循迹小车的运动控制原理、舵机与直流电机的控制原理、面包板实验电路搭建等实验相关知识点,并下载相关软件学习。
3) 课堂上通过随机提问等形式,检查学生的预习知识掌握情况,对有疑问的部分重点讲解。
4) 堂上教学在讲解单片机基本控制系统的构成和原理,重点结合实验项目任务,介绍不同传感器种类和输出信号、模拟信号转换为数字信号的不同方法,PWM信号产生,功率放大的基本原理、单片机控制系统基本构成等。
5) 结合小车的循迹任务,简单介绍闭环反馈控制原理。
6) 安排 1 次方案研讨课。课前分组制定控制系统的设计方案,课堂上各小组互相展示设计内容,小组间互相提问找到存在的问题,然后分组再讨论完善,由教师进行方案点评与指导。
7) 实验过程中,注意学会使用工具进行调试,如采用万用表检测关键点的电压、常用元器件的检查,以及软件调试中采用串口打印信息的方法。
8) 小车的实现原理是多样的,如在运动上有2轮差动式、4轮驱动以及驱动前置、后置的区别,还有包裹投放电机采用定位还是定时控制也是与设计相关的。这在软硬件中有不同的处理方法。
9)在小车现场调试时,注意分析传感器、控制器、驱动等各项参数的影响,通过在几种不同场地上的测试调整出一套最合理的参数,提高抗干扰能力和性能。
10) 组织总结答辩,各小组展示成果,交流学习,拓宽视野。
7.实验原理及方案
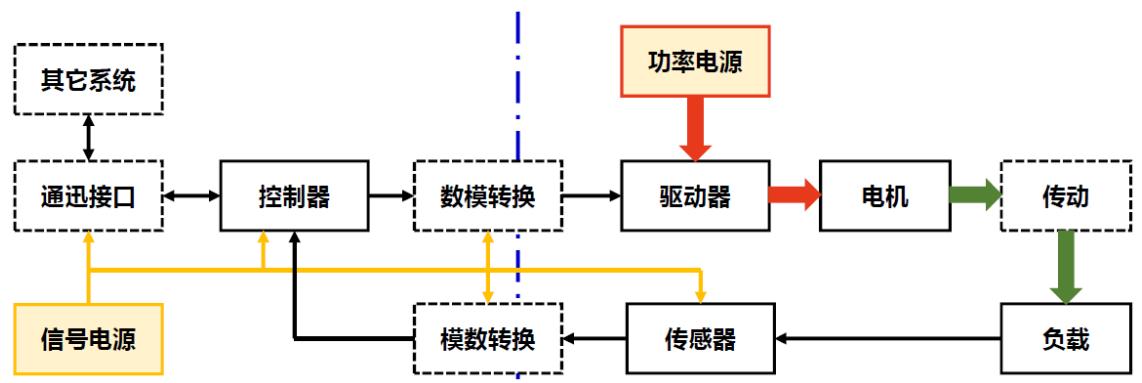
图1 控制系统总体结构
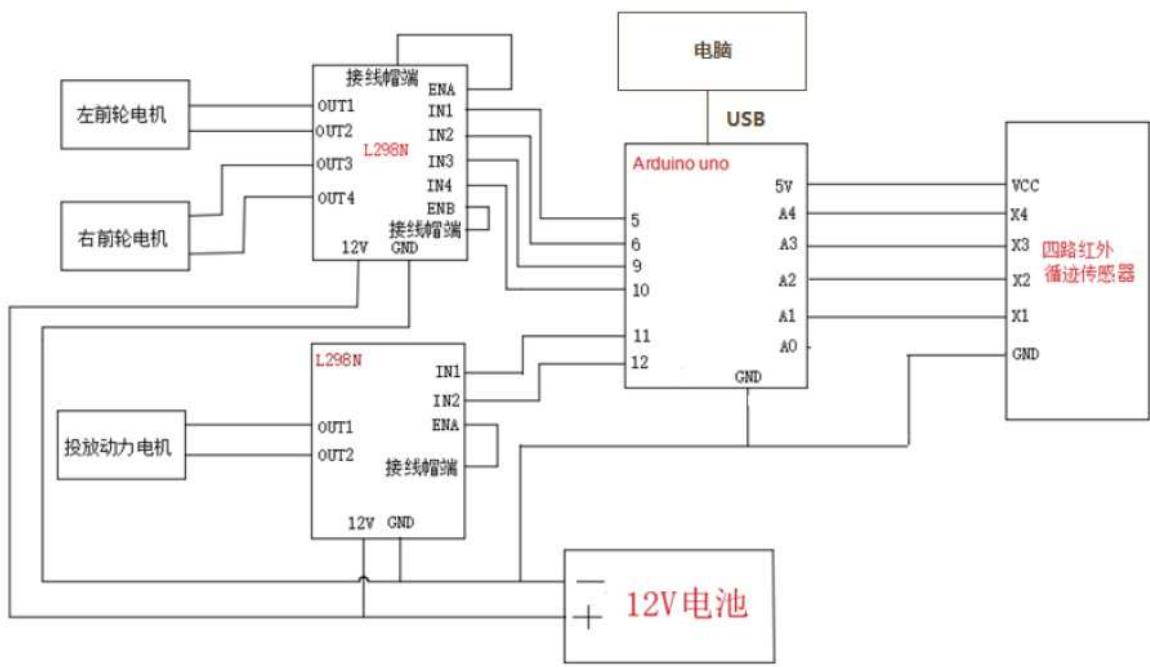
图2 基本接线参考图
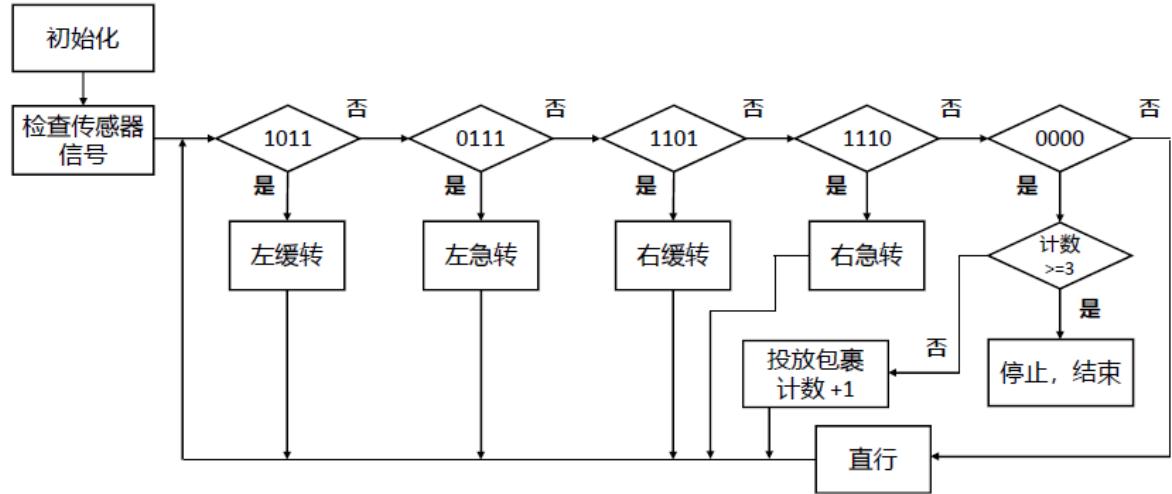
图3控制器参考流程图
本实验的智能派送小车总体结构如图1所示,由控制器通过模数转换采集传感器的信号,经过程序算法处理产生电机的控制指令,经数模转换后,由电机驱动器驱动各个电机按照指令运动,从而控制小车的运行。控制器可通过通讯接口与其他系统(如电脑)进行通讯。供电分为执行机构的功率电源和控制电路的信号电源。
完成最基本任务的信号接线可参考图2。该方案针对直流差速驱动的小车,并采用直流电机实现包裹投放。主控使用 Arduino Uno,采用2个L298N芯片作为电机功率放大驱动器,其中1个连接 2路差速电机控制小车完成前进、转向,另一个 L298N 连接投放机构的电机。电机由控制器产生 PWM信号,经过功率放大后由电机电感的滤波作用实现数模转换。循迹传感器采用数字输出的四路红外光电传感器,由电压比较器完成模数转换,推挽方式输出,连接控制器数字输入口,各传感器的灵敏度可调节。
完成任务的参考控制软件流程见图3。首先进行初始化,然后通过主循环检测光电传感器的输入信号,并编码为4位二进制数据,可以根据该数据判断偏差的方向及大小,从而驱动差速电机进行补偿校正,实现循迹功能。当检测到地面投递标志时,驱动投放电机放置包裹并进行计数。派送结束后检测到终点线小车停止。
控制方案可选用不同的传感器,如循迹也可使用模拟量输出的传感器,从而对信号强度进行量化。或采用串口通讯的传感器,可用少量的IO口资源检测更多路的光电开关量信号。
电机控制上,直流减速电机可增加霍尔编码器反馈,实现小车速度、里程的监测;投放机构也可以使用舵机控制,有助于调节执行机构位置提高投放的精准性。
在基本电路上还可以增加一些数码管、指示灯、蜂鸣器等用于信息提示,提示客户收取包裹。也可增加通过蓝牙模块实现无线通讯等附加功能。
8.教学实施进程
本项实验教学设计的思路是,通过实验教学过程,引导学生了解智能派送小车控制系统的工程设计实施步骤,以达到提升自主学习能力和工程设计水平的目的。实施进程如下:
1) 由教师在课堂上布置本次实验,简要讲解智能派送小车任务的应用背景,进行实验分组。
2) 学生课下进行预习,自主查找阅读相关资料,了解主要元器件原理,熟悉软件开发环境。
3) 给各组分发实验材料,让学生认知电路元器件,进行简单测试。
4) 通过堂上集中教学,对电路和软件算法设计中的重点和难点进行讲解,启发学生的设计思路。
5) 学生课下进行初步控制方案的设计,形成文档作为预习报告。
6) 开展研讨课,分组讨论总体方案,设计电路和软件算法,小组互相交流,指导教师进行点评。
7) 学生课下完善设计方案,并编写控制程序。
8) 实验课开始前,结合实物和场地讲解控制系统组装和调试的注意事项和安全操作须知。
9) 学生进行电路接线,组内同学相互检查,确认正确后可通电测试。
10) 学生硬件测试后,下载控制程序进行调试,检查程序正确性,实验老师给予指导。
11) 学生在场地上进行验证和测试,在教师指导下优化各项参数,提高可靠性和性能。
12) 组织各组在场地上进行派送任务测试,记录实测结果,由教师验收。
13) 小组派代表演讲,讲解方案原理,并进行答辩,由教师点评。
14) 学生完成并提交实验报告,教师进行批改。

图4 实验现场

图5答辩过程
9.实验报告要求
实验报告需要反映以下工作:
1)实验系统的需求分析;
2)实验系统的实现方案论证
3) 系统组成介绍,包括元器件名称、型号、参数等;
4) 系统的整体工作原理;
5) 控制系统电路接线图;
6) 软件流程图;
7) 关键算法的实现;
8)任务完成情况小结;
9)总结实验过程中的问题及解决办法,有哪些心得体会。
10.考核要求与方法(限300字)
1) 电路原理设计 $( 1 0 % )$ :接线图的正确性、完整性、规范性。
2)控制程序设计 $( 1 0 % )$ :考察程序逻辑算法是否正确,代码是否规范。
3) 实验完成情况 $( 4 0 % )$ :现场考察控制功能完成程度,包括循迹是否正常、包裹投递的准确性、停止位置的准确性和完成时间等方面。
4) 实验报告 $( 2 0 % )$ :实验报告的正确性、完整性和规范性。
5) 提问和答辩情况 $( 1 0 % )$ :考察对传感器、执行器、控制器及其他电路应用知识的掌握,系统方案的合理性、工程概念的正确理解、现场表达能力。
6)创新性 $( 1 0 % )$ :是否有较为独特的好的解决方案。
11.项目特色或创新(可空缺,限150字)
1)项目来源于生活实际,有很强的工程背景,需要运用传感器、单片机控制、电机驱动、通讯、程序开发、调试等综合知识。
2)实现方案灵活多样,可扩展性强,赋予学生充分自主设计空间,满足多层次教学需求。
3)工程难度适中,但具有一定挑战性,适合大一新生快速掌握电子系统设计基本流程和技能。
参赛信息表
| 案例提供单位 | 天津大学 | 相关专业 | “未来智能机器与系统”平台(电子科学与技术、自动化、人工智能、智能制造) | |||
| 设计者姓名 | 董靖川 | 电子邮箱 | jcdong@t ju.edu. cn | |||
| 移动电话 | 13612166725 | 通讯地址(含邮编) | 天津市津南区海河教育园区内雅观路135号天津大学北洋园校区35楼216室邮编:300354 | |||
| 设计者姓名 | 康荣杰 | 电子邮箱 | r jkang@t ju. edu. cn | |||
| 移动电话 | 15510972041 | 通讯地址(含邮编) | 天津市津南区海河教育园区内雅观路135号天津大学北洋园校区37楼南楼335室邮编:300354 | |||
| 设计者姓名 | 电子邮箱 | |||||
| 移动电话 | 通讯地址(含邮编) | |||||
| 相关课程名称 | 设计与建造| | 学生年级 | 大一 | 学时(课内+课外) | 8+8 | |
| 支撑条件 | 仪器设备 | PC机、万用表 | ||||
| 软件工具 | Arduino IDE、ArduBlock、Fritzing | |||||
| 主要器件 | ArduinoUno控制板、红外光电传感器、电机驱动板、舵机、直流减速电机、LD0 电源模块、面包板、阻容元件、LED、蜂鸣器 | |||||