
智能电子导盲犬
课程名称:单片机应用课程设计
实验题目:智能电子导盲犬
课程简要信息
课程名称:单片机应用课程设计
课程学时:30学时
适用专业:通信工程,电子信息工程,电子信息科学与技术,光电工程
学生年级:大学三年级
实验内容与任务(限500字)
实验任务:设计一款基于K60单片机的智能电子导盲犬。
基本要求:以K60单片机为核心,构建轮式移动型电子导盲犬,利用超声波模块和红外寻迹模
块实现辨别道路情况,自主避障,语音播报/提示等功能,以及控制的自动化,基本
实现辅助盲人出行。
提高部分:1、使用定位和导航技术,进行路线导航。
2、采用语音控制和语音合成技术,能够实现定位信息播报、障碍物语音提示、时间
播报、装置运行状态语音提示等功能,实现人机交互。
3、其他你能想到的任何发挥内容。
提交材料:实验电路图 实验程序 实验报告
实验过程及要求(限300字)
-
提前一周布置任务,要求学生做好预习,并学会相关软件及硬件的使用。
-
查阅资料,尽可能多的查找满足实验要求的方案,分析比较各方案的优缺点,确定最优方案。了解方案中相关实验原理,及所用器件的相关原理和使用方法。
-
按照所选方案,先设计出整体电路原理图,然后拆分细化原理图,对每个小部分进行进一步的完善和设计。在此环节学生可根据自身的能力选择独立完成实验还是分组完成。分组的目的是充分调动学生的主观能动性,发挥其自身能力和特长,培养团队协作精神和沟通交流能力。
-
列出元器件清单,领取所有所需元器件,搭建出完整的实际电路。
-
利用IAR Embedded Workbench开发工具及Keil- Uv5 进行软件开发,JLINK仿真器运行调试程序和硬件电路,直到实现所有实验要求。
-
验收答辩:独立完成的学生完整介绍作品的原理和方案,进行实物演示,解答教师提出的问题。分组完成的学生先进行实物演示,然后分别介绍作品中本人完成部分的原理和方案,解答教师提出的问题,要求分组完成的同学对实验的整体原理也要有一定程度的认识。所有学生答辩结束后进行讨论,互相交流实验心得。
-
撰写实验总结报告,要求用WORD编辑打印。
**[提高部分:]{.mark}**利用Altium Designer软件绘制原理图,制做PCB板,焊接整个电路,下载程序到
单片机中,制作成一个独立的单片机小作品。
相关知识及背景(限150字)
智能电子导盲犬是学生比较感兴趣的题目,本实验是基于K60单片机的电子导盲犬系统,需要综合运用模拟电路、数字电路、单片机原理与接口及各种传感器等相关知识,具体涉及MK60DN512ZVLQ10处理器、单片机串口通信、超声波、红外传感器、语音识别、语音合成、GPS定位导航、显示原理、自主避障等等;学会使用IAR Embedded Workbench开发工具、Keil- Uv5、Altium Designer等软件工具;了解制作PCB板过程;学会利用JLINK仿真器调试程序及硬件电路、程序下载、焊接电路等技能。
教学目标与目的(限100字)
本次教学采用学生感兴趣的题目,以学生为主体,要求学生综合运用所学专业知识,掌握32位单片机系统开发的整个流程,培养学生软硬件设计的能力(查资料了解芯片、构思设计电路、相关软件使用等)、实践能力(焊接调试、报告撰写等)、分析和解决问题的能力以及创新精神、团队意识和工程意识。
教学设计与引导
本实验是学生利用K60单片机设计一个单片机应用系统的过程,包括构思、设计、制作、
运行、调试和实现等各个环节。在整个实验过程中,采用学生为主体,教师辅助指导的形式。
[教学设计:]{.mark}
- 实验开始一周之前,进行一次2学时的课堂教学,指导学生充分利用图书馆、网络等资源查
阅资料,了解实验相关原理,了解实验所用器件的原理和使用方法,学会使用相关软件工具。
- 对K60单片机进行简单介绍,主要有K60单片机的主要特点,应用范围,内部结构等。重
点介绍本次实验所用到的相关功能。
3)简单介绍实验中涉及的相关元器件及原理,如:超声波模块、红外传感器、语音识别、语音
合成、GPS定位导航、定位与路线规划算法等等。
4)讲解单片机应用系统设计的一般思路和方法,提醒学生在软件设计和硬件设计中应注意的问
题。
- 演示讲解IAR Embedded Workbench开发工具、Keil- Uv5的软件功能,开发环境,使用注意
事项等。讲解仿真器相关知识,为学生演示如何利用JLINK仿真器运行调试程序和硬件电
路,指出学生调试过程中常见错误,避免因操作不当导致的实验结果无法实现。
6)简单介绍Altium Designer软件的功能,提供给学生制作PCB板、焊接电路等相关资料。
7)提供学生常用元器件的参数及使用注意事项。
8)介绍实验室中常用仪器的使用方法及使用注意事项,指出在实验室中做实验时需遵守的规则,
重点强调用电安全。
9)提出撰写实验报告的要求,给出实验报告模板,规范实验报告撰写格式。
[教学引导:]{.mark}
- 学生查阅资料后,会提出不同种的设计方案来完成实验要求,如果学生对方案把握不准确,
要给予学生一定的指导,引导学生综合各种因素,最终确定方案。
- 学生在制作实际电路时,会因为各种主观原因和客观原因导致不出实验现象,例如导线断路、
部分元器件损坏、操作不当等等。指导学生先调试单元电路,然后按照信号流的方向逐渐加
入新的单元电路进行联调,最后进行整机调试。锻炼学生自己找错和纠错,培养学生的动手
实践能力。
- JLINK仿真器是学生新接触的硬件设备,所以调试电路过程中学生会出现很多问题,在实验
中对学生出现的问题进行有效指导。
- 在验收答辩阶段,教师对实验的知识点和实验各个环节出现的常见问题进行归纳和总结,对
个别同学提出的疑惑进行解答。
5)组织学生在答辩阶段互相交流经验,了解不同解决方案及其特点,拓宽知识面。
6)提出撰写实验报告的要求,给出实验报告模板,规范实验报告撰写格式。
7)对于制作PCB板的同学,介绍画板、制版过程,电路焊接技术及各个环节的注意事项。
指导学生利用JLINK仿真器下载程序到单片机中。
实验原理及方案
[实现方案]{.mark}
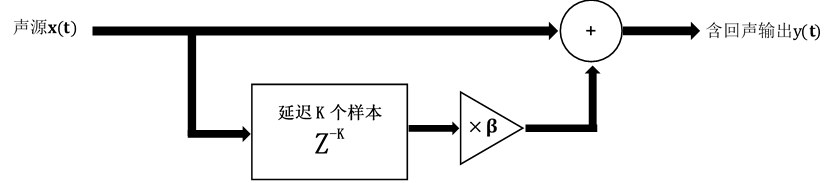
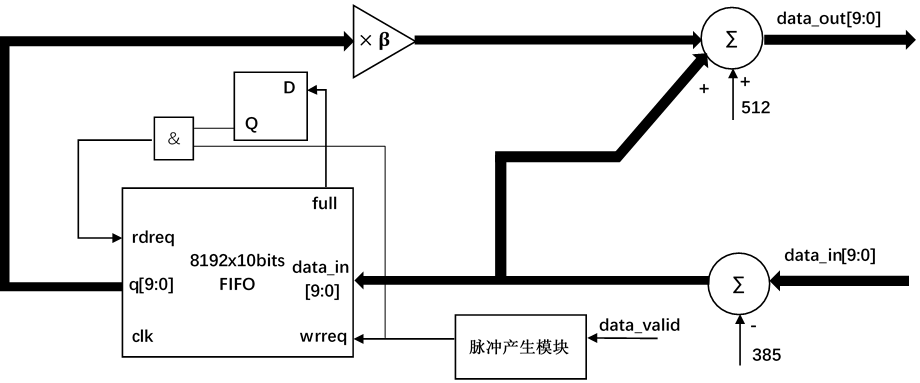
本实验采用K60单片机芯片进行智能电子导盲犬的设计,采用多路超声波测距传感器检测障碍物,辨别道路状况,并结合红外线反射式传感器检测道路线,系统控制平台采集数据,使用讯飞语音芯片的语音合成和语音识别处理器,实现自主避障,定位导航、语音控制、语音播报/提示等功能,以及控制的自动化,基本实现辅助盲人出行。图1为实验方案框图,图2为电路原理图。
主控处理器采用的是ARM Cortex-M4系列的MK60DN512ZVLQ10处理器,其性能强大,完全满足项目需求。
行进主体采用的是履带式底盘,能够极大提高行进主体的地形适应性,实用性极大。采用9V直流电机,堵转力矩达9.5kg.cm,具有较大的驱动力,完全能够满足一般条件下对人体的适当力度的牵引。
语音识别和语音合成部分采用LD3320芯片进行语音识别,能够识别预置的语音口令,从而可以实现通过语音对电子导盲犬的控制和交互。语音合成采用的是科大讯飞XFS5152芯片,能够实现任意中英文内容的语音合成,通过软件设计,能够实现定位信息播报、障碍物语音提示、时间播报、装置运行状态语音提示等功能。
定位与路线规划,针对简单区域,设计了一种简易定位与路线规划算法。能够在简单区域内实现基本的定位和关键位置搜素,进行简单的定位与导航,基本达到预期效果。
图1
 图2
图2
整个系统利用各传感模块和对应算法实现电子导盲犬的最终导盲功能。盲人将通过语音系统指令控制机器人,GPS 定位、避障、红外寻迹检测模块帮助机器人正确规划路径,以及安全行驶能力。系统在运行过程中实时采集当前环境数据,语音提示盲人,检测机器人行驶路线,并在目标出现后正确判断目标的功能。
[方案原理]{.mark}
1)主控系统
主控芯片采用了 Freescale系列的Kinetis K60芯片MK60DN512ZVLQ10,外设丰富,接口方便,尤其是具有多路UART串行同学口,能够十分方便的与外设通信,主控系统负责处理定位信息、导航信息、道路信息和语音信息,并同时控制小车驱动系统、输出显示、语音合成、按键识别等模块,同时包含了电源系统。主控板原理图如图3。

图3
2)超声波避障及红外循迹模块
因为定位只能低精度的指示路线和方向,而对于具体的道路,电子导盲犬的路线指引就要依赖于道路识别与避障系统,道路识别与避障的任务在于识别障碍物和确定道路方向。我们采用了三个 HC-SR04 超声波传感器, 超声波测距采用 I2C 和 TTL串口通信直接输出目标距离。盲区1cm,测较大平面物体最大量程达7-8米。平均精度 2-3mm。最高时达 1mm。分别安装在正前方和左右两边,分别检测三个方向的障碍物,并为路线制定提供决策依据。红外循迹模块能够检测道路边线,辅助进行沿边线前进。图4为超声波和红外模块布局图。
图4
3)行进主体及电机驱动
行进主体采用定制的Doit系列双驱动履带式底盘小车。尺寸为185*200*60mm,采用两个9V25mm直流碳刷电机,最大负载电流1200Ma,堵转力矩达9.5kg.cm,具有较大的驱动力,完全能够满足一般条件下对人体的适当力度的牵引。电机驱动采用的Toshiba双电机直流驱动IC TB6612FNG驱动芯片。TB6612FNG是LD MOS结构的输出晶体管,低导通电阻的直流电机的驱动器IC。两个输入信号IN1和IN2可以选择CW,CCW,短路制动和停止模式四种模式中的一种。
从而能够有效控制小车实现前进后退,左右及任意角度转弯,并且具有转弯半径小,转弯速度快的优点。
4)语音识别和语音合成
语音识别: 采用 LD3320,LD3320 是一颗基于非特定人语音识别(SI-ASR:Speaker-Independent Automatic Speech Recognition)技术的语音识别/声控芯片。LD3320 芯片上集成了高精度的A/D 和 D/A 接口,不再需要外接辅助的 Flash和 RAM,即可以实现语音识别/声控/人机对话功能。并且,识别的关键词语列表是可以动态编辑的,这些为电路设计和软件编程带来很大便利。经过测试, 该芯片识别准确率较高,在两米范围内能够比较好的识别语音内容,能够识别的关键词也是任意设置的。图5为语音识别电路。设计的语音识别口令包括:开始、停止、定位、播报时间。
图5
语音合成:本项目同时采用语音合成技术,将提示信息通过语音合成芯片进行合成转换后通过喇叭播放出来,对盲人而言具有很高的实用性。语音合成采用的是科大讯飞的 XFS5152 中英文语音合成芯片,该芯片支持真人发音,支持 GB2312,GBK,BIG5和 UNICODE 多种编码格式,一次最多可支持4K 字节内容。主控通过串口将 UNICODE 编码的文本内容发送给 XFS5152,通过芯片的语音合成算法,产生音频信号输出。借助于该模块的强大功能,我们的设计了地点信息播报、关键信息提示、障碍提示、语音报时多种功能。图6为语音合成电路图。
图6
- 定位检测系统
定位模块采用了 Beitian BN-280 GLONASS双模定位卫星定位模块, 同时支持 GPS卫星、北斗卫星、GLONASS 卫星。使用时可任意两种组合,具有较高的定位精度,使用 NMEA-0183 输出协议。控制处理器器通过UART串口通信方式与 GPS 接收机通信,将GPS模块串口输出的字节流进行处理, 提取出测试点的地理信息(经度,纬度,UTC 时间)。模块支持的最大读取速率是10HZ,考虑到实际情况,读取速率为1HZ已经能够满足本项目实际需求。采集的经纬度数据支持四位小数精度,大多数情况下多是在小范围内运动,经纬度数据不会有很大变化,因此定位时使用了全部小数位,提高定位准确度。下图显示的是2个地点的定位数据。
定位数据通过百度地图坐标拾取功能进行比对,结果还是比较准确的。读取坐标后,可以写入存储器,记录道路数据,从而也能够实现轨迹记录。定位的同时能够同步时间,精确到秒,这为后面的语音报时提供了时间基准。
6)定位与路径规划
设计了一种简单的定位与路径规划导航,能够实现在小范围的简单区域内进行简单的定位与路径规划导航。大多数导航系统由两级规划组成,即局部规划(Local Planning)和全局规划(Global Planning)。
全局路径规划的主要方法有:可视图法、自由空间法、环境地图法和栅格法等。可视图法是将机器人视为一点,将机器人、目标点和多边形障碍物的各顶点进行组合连接,考虑实际情况我们初期是在进行定位与导航实现,结合实际效果,选择使用可视图法。将地点和障碍物均建模为节点,全局组成网络图,然后计算最优路径。在构建路网模式时,一般采用图论中的“图”来表示路网,然后通过图论中的网络分析来研究路径规划问题,构建道路网络 G的路网模型如下:
节点(Node/Vertex,记做 V):道路的交叉口或断头路的终点;
边(Edge,记做 E)/弧(Arc,记做 A):两节点之间的路段称为边,若规定了路段的方向,则称为:弧。
边(弧)的权(Weight,记做 W):是路段某个或某些特征属性的量化表示,也称路段的权重或边的权重。
路网中的节点、边 构建的路网图结构
邻接表是另一种常用的图的存储结构。路网作为一种特殊的网络,遵从一般的网络表达方法和存储结构,邻接表已被证明是网络表达中最有效率的数据结构,在最短路径算法中得到了广泛应用。因此本项目将采用基于邻接表的数据存储方式。
最经典的点对点间的最优路径规划算法有 Dijkstra 算法、Floyd算法等。Dijkstra 算法是一个适用于所有弧段权重均为非负的最短路算法。它可以给出从某个节点到所有节点的最短路径。Dijkstra 算法采用了贪心技巧,在每一步都选择局部最优解以期望产生全局最优解。
基于以上思想,本项目设计的简易算法为:
a、设定一个活动区域范围,对范围内的所有关键地点,如十字路口,拐弯处设置为节点,测量节点的坐标和节点间距离,构建路网结构。
b、对在区域内的任意一点,采集GPS定位数据,读取经纬度,使用最近邻算法,确定该位置所属的节点。
c、输入目的地后,查找内部数据库得到目的地所属节点,使用Dijkstra算法进行最短路径,确定当前位置与目标位置的最优路线。
基于Dijkstra 算法的最短路径 实际测试
7)线路归位算法
在自动导航过程中,导盲犬遇到障碍物可自动选择绕行,并根据绕行距离计算出航向的偏离程度,GPS 重新进行定位,依据原有导航路线数据,驱动机器人移动部分,重新回到原有路径。
在道路边线循迹过程中,将利用红外循迹模块以及超声波模块判断道路边线,并根据检测信息使机器人始终保持在道路边线行驶。
教学实施进程
- 实验开始一周之前,进行一次2学时的课堂教学,目的是完成课题的布置与解析,指导
学生查阅资料,讲解实验相关原理、器件的原理及使用、软件的使用等等。
-
学生用一周的时间查阅资料,学习相应的实验原理,硬件和软件,设计实验方案。
-
学生利用一周的时间到实验室进行实验,实验室随时开放,学生可充分利用实验室的各
项资源。实验过程以学生为主体,可相互讨论,教师辅助指导,充分培养学生的实践能
力,分析和解决问题的能力,最终完成实物的制作。需要注意的是学生在实验之前必须
对其电路的设计思路进行讲解,教师通过后方可领取元器件进行实物的制作,未通过的
同学不能进行实验。
- 实验最后一天进行验收答辩,学生制作5分钟的PPT进行总结演讲。独立完成实验的学
生完整介绍作品的原理和方案,进行实物演示,解答教师提出的问题。分组完成的学生
先进行实物演示,然后分别介绍作品中本人完成部分的原理和方案,解答教师提出的问
题,要求分组完成的同学对实验的整体原理也要有一定程度的认识。所有学生答辩结束
后进行讨论,互相交流实验心得。
- 实验结束后学生利用一周的时间撰写总结报告,每个人的报告要独立完成,不能抄袭,
若出现雷同,所有雷同报告的学生均无最终实验成绩。
实验报告要求
需要学生在实验总结报告中反应以下工作:
1)摘要:说明实验的背景和主要内容,对如何实现实验内容进行概述。
2)详细实验内容和要求。
3)实验研究的目的和意义。
4)提出满足实验要求的各种方案,论证其可行性。分析比较各种方案的优缺点,确定最终方案。
5)具体阐述所选方案的实验原理,绘制原理图,确定元器件,参数选择等。
6)实验软件设计过程,包括程序流程图、编译调试程序、硬件仿真过程等等。
7)实物制作和调试过程:如何制作实际电路,利用仿真器运行调试程序和硬件电路。使用的主
要仪器和仪表,调试电路的方法和技巧,调试中出现的故障,原因和解决方法。
-
制作PCB板、烧录程序等过程。(提高)
-
实验现象的描述和分析。
-
发挥部分的实现与调试。
11)实验总结,心得体会,设计方案有待完善之处及改进方法等等。
12)参考文献
13)附录:包括元器件清单和源程序
考核要求与方法(限300字)
[实验考核:]{.mark} 成绩=实验完成状况50% + 答辩情况30% + 实验报告20%
[成绩评定标准:]{.mark}
1)理论知识:是否对实验原理有清楚、深入的理解,方案设计的合理性,电路设计的规范
性。
2)软硬件操作:是否熟练运用IAR Embedded Workbench开发工具、Keil- Uv5软件及JLINK
运行调试程序和电路。
- 实物验收:是否独立完成电路的搭建,是否制作PCB板,焊接质量,电路运行的稳定性,
功能和性能指标的完成程度,完成时间,实物所用元器件选择的合理性,成本核算。
- 创新能力:电路设计的创新性,能否在借鉴别人方案的基础上,完善实验方案,提出改进方
法。
5)实践能力:能否综合运用所学知识完成实验,充分利用实验室资源进行电路的检测和调试,
分析和解决问题的能力。
6)答辩验收:是否清楚阐述实验设计的内容,熟练进行实物演示,回答教师提出的问题。
7)实验报告:撰写报告是否规范完整,文字表达是否简明清楚。
项目特色或创新(可空缺,限150字)
- 项目开发的工程性:实验要求学生利用32位单片机进行一次完整的系统开发,使学生了解
产品开发思路和过程。
- 先进性和实用性:学生接触到目前先进的单片机设计技术,为今后的项目开发打下基础,提
高学生市场竞争力。
-
综合性:综合运用模拟电路、数字电路、传感器等相关知识,培养学生的综合实践能力。
-
探索性:实验方案多样化,对多种方案进行探索论证,培养学生创新精神。
5)互动性:师生之间、学生之间充分互动,以学生为主体,教师辅助指导,激发学生学习兴趣。
6)层次化:将实验内容分层次,采用层次化的教学方法和考核方式,以满足不同能力学生的实
践需求。
附件
下面照片为学生制作的基于K60单片机的智能电子导盲犬。
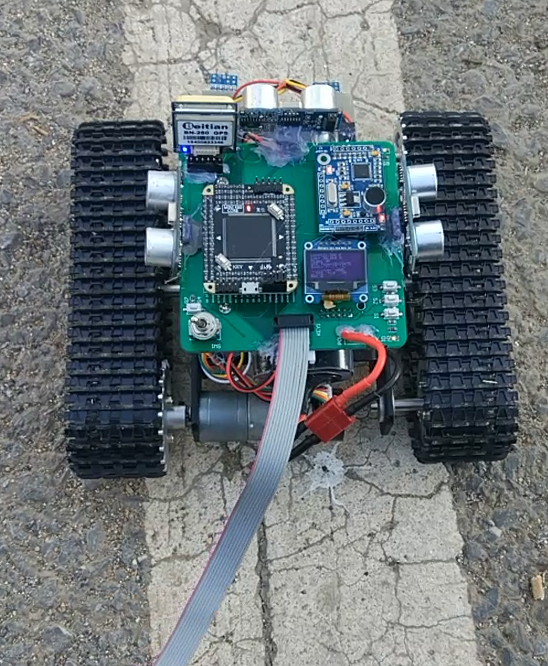

沿道路行走 避障转弯 信息显示
参赛选手信息表
| 案例提供单位 | 大连海事大学 | 相关专业 | 通信、电信、电科、光电 | |||
|---|---|---|---|---|---|---|
| 设计者姓名 | 翟朝霞 | 电子邮箱 | shirlyllei@126.com | |||
| 移动电话 | 13604947655 | 通讯地址 (含邮编) |
大连海事大学西山电航楼311室 邮编:116026 |
|||
| 设计者姓名 | 金国华 | 电子邮箱 | jingh@dlmu.edu.cn | |||
| 移动电话 | 13500730860 | 通讯地址 (含邮编) |
大连海事大学西山电航楼307室 邮编:116026 |
|||
| 设计者姓名 | 谭克俊 | 电子邮箱 | tankejun@dlmu.edu.cn | |||
| 移动电话 | 13998624541 | 通讯地址 (含邮编) |
大连海事大学西山电航楼223室 邮编:116026 |
|||
| 相关x课程名称 | 单片机原理与应用 单片机应用课程设计 |
学生年级 | 大三 | 学时(课内+课外) | 30 | |
支撑 条件 |
仪器设备 | 计算机、JLINK仿真器、热转印机、腐蚀桶和腐蚀液、打孔机、打印机、示波器、稳压电源、万用表、电烙铁等 | ||||
| 软件工具 | Keil- Uv5、IAR Embedded Workbench、Altium Designer | |||||
| 主要器件 | MK60DN512ZVLQ10单片机,LD3320芯片,XFS5152芯片,OLED显示模块,锂电池,HC-SR04 超声波传感器,红外循迹模块,双驱动履带式底盘小车,GPS模块,电阻、电容、芯片座、按键、电池槽、孔板、焊锡、导线等 | |||||