
智行追踪巡航车





全国高校电工电子基础课程实验教学案例设计竞赛
案例设计报告
案例名称:[《智行追踪巡航车》]{.underline}
[项目化实验教学案例]{.underline}
实验题目:智行追踪巡航车
课程简要信息
**课程名称:**职业本科《电子技术》
**课程学时:**80学时
项目学时:(课内6学时、课外6学时)
适用专业:(职业院校电类相关专业)
开设学期:(大一下)
**线上平台:**学银在线([https://www.xueyinonline.com/detail/240810318]{.underline})
实验内容与任务(限500字,可与“实验过程及要求”合并)
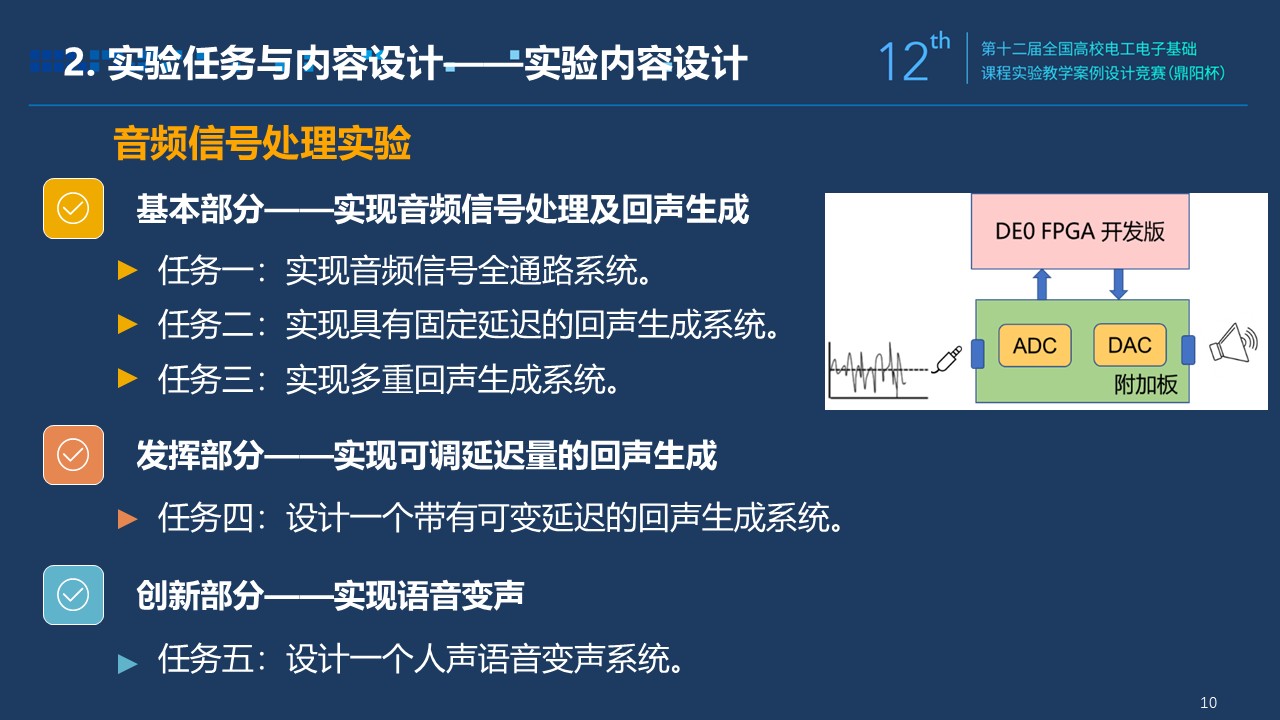
本课程以《智能小车》为实战项目,巧妙地将电子技术知识与技能融入到实操环节,力求实现理论与实践的无缝对接,其核心目标在于全面培育学生的电子技术基础应用能力。为实现这一目标,我们紧扣岗赛证的实际需求,精心策划了8个层级递进的项目,这些项目从基础起步,从基础到复杂,由局部到整体,构筑起一条技能进阶的完整链条,助力学生逐步掌握电子技术的精髓。
图1岗课赛证、技术牵引、产品载体、理实融通、能力本位的案例设计背景
如图1所示,本案例《智行追踪巡航车》旨在让学生在完成视觉系统、电力系统、驱动系统等前期子项目的基础上,全面运用所学知识,设计与装调一款智能小车,这款小车能精准追踪任意轨道并进行巡航。本案例的核心在于设计并打造出这款功能强大的智行追踪巡航车,其能够灵活追踪不同轨道,实现高效巡航。通过这一综合性项目的实施,学生不仅能够深化和拓宽电子信息类专业的知识和技能,如电路设计与组装、器件选型、电路方案比较与优化等,更能深入了解企业级电子产品研发流程,为日后的职业生涯积累宝贵的实践经验。具体的实验内容与任务涵盖以下几个方面:
表1 实验内容与任务
| 分层任务 | 任务要求 | 具体实施 |
基础技能培养 (完成学生占比60%) |
①巡航车系统方案设计 | 根据实验要求,设计一款能够实现智能追踪功能的巡航车系统方案。方案应包含机械结构设计、电子控制系统设计、传感器选型与布局等内容。提交一份详细的系统方案设计报告,包括设计思路、技术路线、关键参数选择等内容,并进行方案论证,确保方案的科学性与可行性。 |
| ②巡航车硬件电路设计与制作 | 根据系统方案完成硬件电路的原理图设计与PCB版图绘制,设计并制作巡航车硬件电路,包括电源管理电路、电机驱动电路、传感器信号采集与处理电路等。制作电路板并进行焊接组装。 | |
| ③巡航车整体装调与测试 | 完成巡航车的整体组装后,进行功能测试与性能评估,确保巡航车能够按照预期实现智能追踪功能,记录测试数据并撰写测试报告。 | |
| ④实验总结与报告撰写 | 学生需对整个实验过程进行总结,撰写完整的实验报告,包括实验目的、实验内容、实验过程、实验结果与分析等内容,分析实验中的成功经验与不足之处,并提出改进意见。 | |
高阶思维训练 (完成学生占比30%) |
提升巡航车的性能 | 从以下几个方面升级智行追踪巡航车的性能指标: ①增加负载,改进巡航车的驱动能力; ②更换9V的锂电池供电,改进巡航车的电源系统; ③增加功能:加入手势识别电路; ④增加功能:加入避障停车电路。 |
创新能力进阶 (完成学生占比10%) |
实现智行追踪巡航车的性能产品的创新和持续优化 | ①从质量观的角度考虑,对电路进行防反接设计,确保在电源连接错误时,能够自动切断电路,防止因短路或极性错误导致的设备损坏。 ②从工程观角度出发,电路设计上采用模块化布局,便于后续的维修与升级,还对巡航车的外观进行精心设计,符合工程应用的实际需求。 ③从系统观角度审视,注重产品的整体性能和协调性,实现智行追踪巡航车的整体性能提升,不断的测试和调试,优化系统的各项参数。 |
实验过程及要求(限300字)
本案例的核心在于设计并打造出这款智行追踪巡航车,其能够灵活追踪不同轨道,实现高效巡航,实验过程共分为8个步骤,如图2所示,具体要求如下:

图2 巡航车案例实验过程与要求
相关知识及背景(限150字)
首先,学生将学习电子电路的基本组成和工作原理,包括电源电路、信号处理电路以及控制电路等,这些电路将负责为小车提供稳定的电力供应、处理传感器信号以及控制小车的运动轨迹。其次,学生将接触到传感器技术和电机驱动技术等相关知识。在项目中,智能小车需要依赖传感器来感知环境信息,如轨道的位置和形状,以及小车的运动状态等。此外,通过亲手搭建和调试智能小车,加深对电子技术原理和应用方法的理解。相关知识和背景如下图所示:
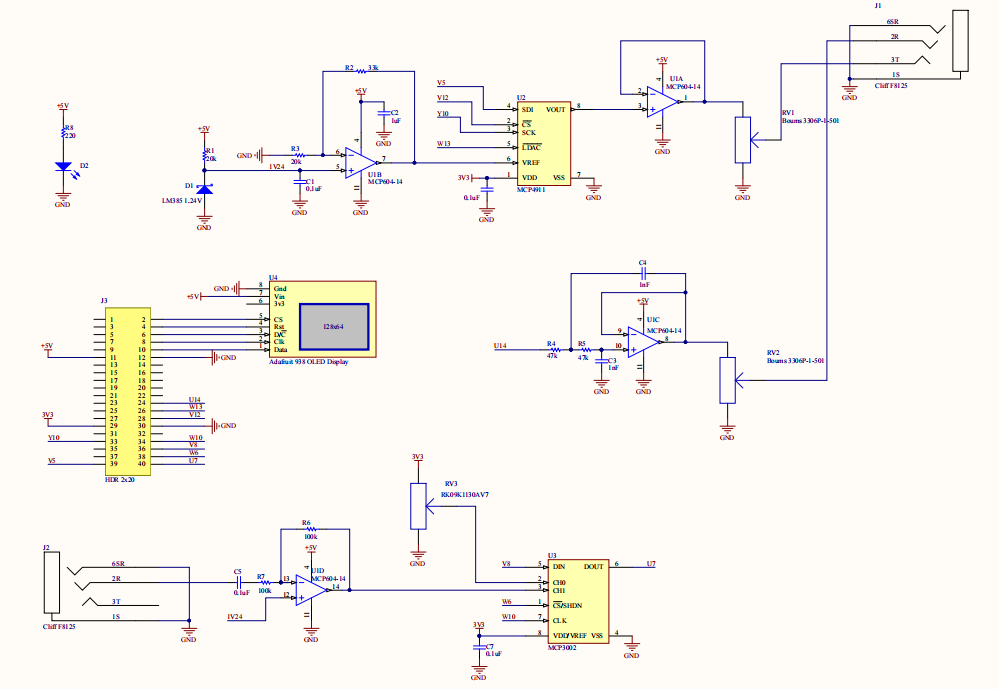
图3 巡航车案例相关知识及背景
如图4所示,知识技能图谱以电子技术为核心,向外扩展至多个相关领域,学生将能够系统地掌握这些知识技能,不仅有助于提升学生的电子技术水平,还能够培养他们的实践能力和创新精神,还能够培养团队协作精神和解决问题的能力,提升个人综合素质。
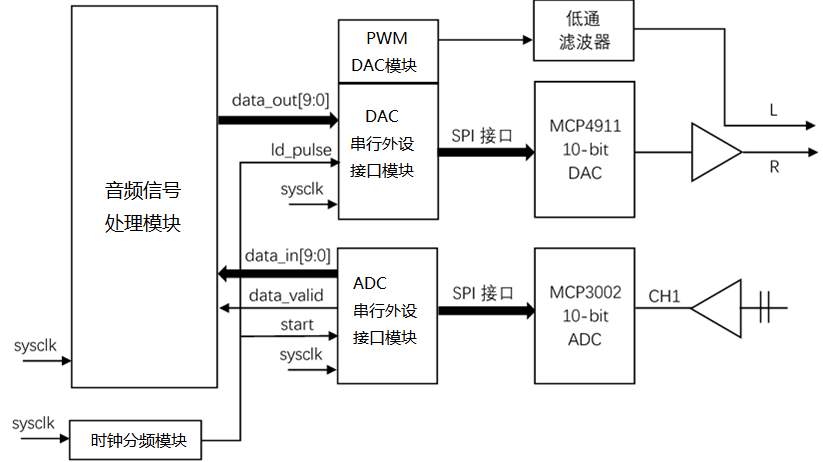
图4 巡航车知识技能图谱
实验环境条件
(1) 我们提供了一套适用于智能电子产品创新实践的实验室硬件资源,包括:
-
**自主研发的智能小车开发系统:**这个系统可以用于实验和验证智行追踪巡航车产品的功能和性能。
-
**PCB快速制板系统和PCB高速印刷机:**学生可以使用这些设备进行快速原型设计和制造。
-
**贴片机和3D打印机:**这些设备可以用于组装和制造电子产品的零部件。
-
**示波器、信号源、稳压电源、万用表等测试仪器:**这些仪器可用于电路测试和性能评估。
图5“智能电子产品创新实践”实验室实景
图6 自主研发的智能小车开发系统
(2) 在项目实施过程中,我们提供以下软件资源:
-
**游戏交互式虚拟仿真预习软件:**我们开发了一款自主的虚拟仿真软件,通过游戏化的交互方式,帮助学生在实验前进行预习和理解相关概念。
-
**Proteus或者Multisim仿真软件:**学生可以使用这些仿真软件进行电路设计和性能仿真,验证其功能和性能。
-
**AD或者PADS等PCB设计软件:**学生可以使用这些软件进行PCB电路板的设计,包括原理图绘制和布局布线。
通过这些软件资源,学生可以在实验前通过虚拟仿真进行预习,提前熟悉电路设计和仿真工具的使用,以及进行PCB设计和布局。这些软件资源将为学生提供实践和应用知识的平台。
图7 自主开发的游戏交互式虚拟仿真预习软件
(3) 我们拥有超过1000+个精心制作的颗粒化资源,内容形式丰富多样,包括微课、动画、实操视频、题库等,全面覆盖学生所需的学习领域。特别值得一提的是,我们还引入了虚拟仿真技术和远程在线实验平台,让学生能够随时随地进行实践操作,提升学习效果。
此外,我们还提供了英文课件和实训项目单卡,以满足不同学生的学习需求。这些资源不仅有助于提升学生的专业技能,还能够拓宽他们的国际视野。
目前,我们的在线课程已经有11200多名注册用户,访问量更是高达3000+万人次,这些丰富的线上资源将为项目实施提供有力的支持,确保学生能够充分利用现代技术手段,高效地完成学习任务。
图8 已开设9期的在线精品课程网站首页截图
(4) 本实验主要电子元器件清单:
表2 智行追踪巡航车主要元器件清单
| 元件名称 | 数量 | 元件名称 | 数量 |
| 电压比较器LM393 | 2 | 放射式光电传感器 | 1 |
| 电解电容100uF/50V | 2 | D触发器 | 1 |
| 电阻51Ω | 4 | 直流减速电机 | 2 |
| 电阻1KΩ | 2 | 电位器10KΩ | 2 |
| 光敏电阻5516 | 2 | 电阻10Ω | 2 |
| 三极管8550 | 2 | 电阻3.3KΩ | 2 |
| 发光二极管 | 4 | PCB制板软件 |
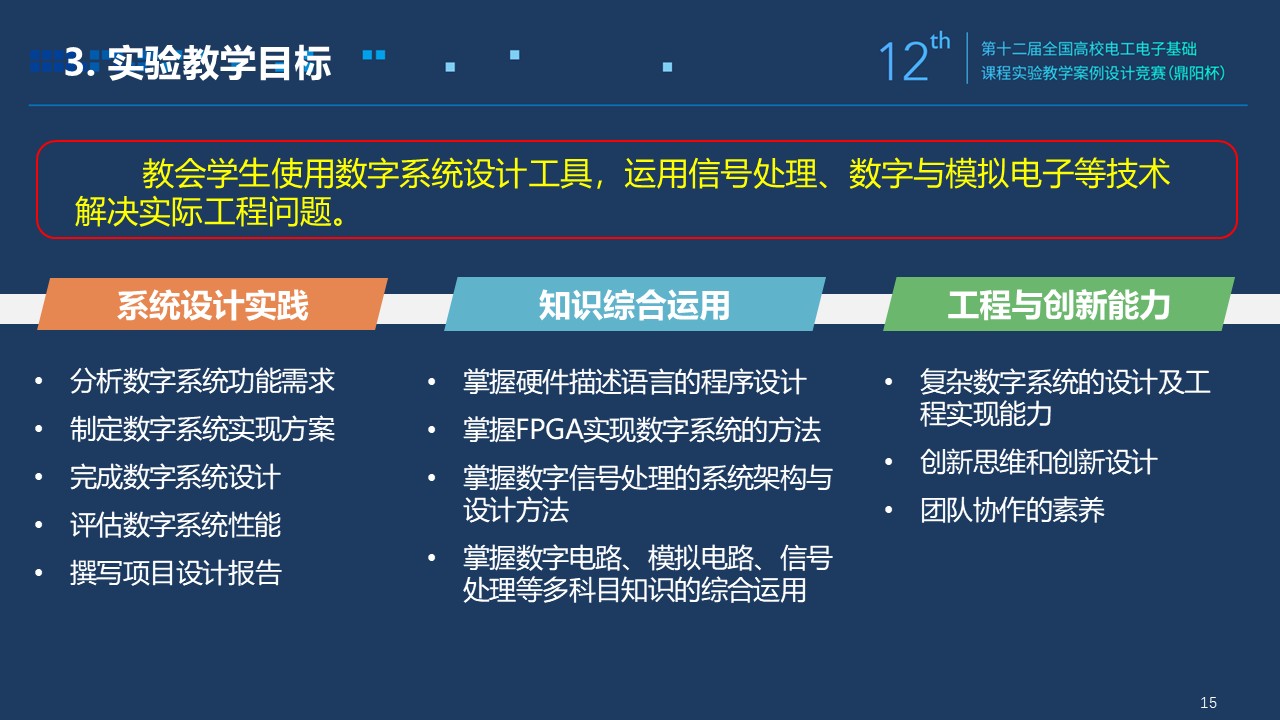
教学目标与目的(限150字)
本案例的教学目标是通过实践项目化的方式,培养学生在电子信息类专业中的设计与实践能力。通过智行追踪巡航车的设计与装调,学生将学习并掌握电子电路设计、传感器应用、电机驱动、机械结构设计等相关知识和技能。通过实验,学生将了解并熟悉智能电子产品开发的全过程,包括设计、装配、调试和测试,提升学生对电子系统设计流程与方法的认识, 理论与实践紧密结合,有效激发学生的学习兴趣与持续学习动力,以及解决实际问题的能力。
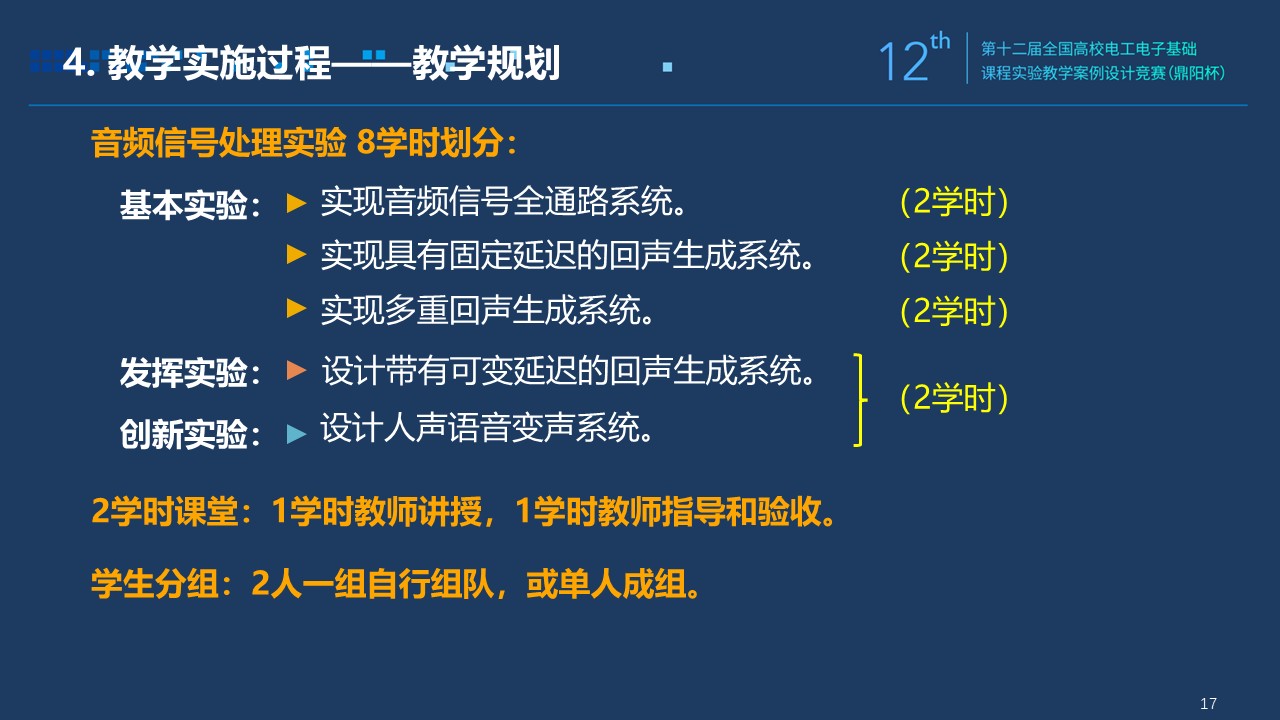
教学设计与实施进程
表3 《智行追踪巡航车》实验(实践)案例教案
| 课前训练 | |||||
| 学习内容 | 教师活动 | 学生活动 | 设计意图 | ||
1.回顾电路和电子技术基本知识、传感器的工作原理、LM393的功能; 2.通过游戏交互式仿真预习系统完成器件识别和线路连接训练。 |
1.在学习通平台发布学习任务和PPT; 2.线上答疑,学生线上学习数据汇总,以学定教。 |
1.在学习通平台自主学习课前任务; 2.根据自学情况提出问题。 |
1.课前线上学习,锻炼学生的自主学习能力,为课中学习和实践打下基础; 2.游戏交互式仿真预习系统让学生了解本案例内容。 |
||
| 教学方法 | 自主学习、因材施教 | ||||
| 能力训练 | 自主学习能力、应用资料检索与引用能力、电路工作原理分析与理解能力、仿真系统应用能力、硬件电路测试与验证能力 | ||||
| 课中训练 | |||||
| 30分钟 | 第一环节——任务 1 智行追踪巡航车任务分析 | ||||
| 设计意图 | 通过探究和分享检测和巩固自主学习的情况,并让学生灵活应用已有知识,尝试提出方案解决实际的电路问题。 | ||||
| 教学过程 | 教学内容 | 教师活动 | 学生活动 | ||
引入项目 (5分钟) |
主题引入: 智能驾驶是怎样实现的? 自动化系统核心模块: 感知——控制——驱动 |
教师演示智行追踪巡航车,说明电路的基本功能。 | 思考并回答问题 | ||
预习检查 (15分钟) |
检查预习内容: 1.电路和电子技术基本知识 2.传感器的工作原理 3.LM393的功能 |
3.引导学生进行电路设计和电路分析。 |
1.分组对预习进行讨论; 2.被抽中的学生上台讲解,其他学生提问并评分; 3.思考并讨论; 4.提出初步解决方案,解决实际问题。 |
||
任务分析 (10分钟) |
实践任务分析: 分析智行追踪巡航车的电路功能,根据电路的功能要求,初步探索解决方案 |
||||
| 60分钟 | 第二环节——任务 2 方案设计和论证 | ||||
| 设计意图 | 动手做并探究:通过循序渐进的任务来设计智行追踪巡航车电路,训练学生分析问题、解决问题和克服畏难情绪,迎难而上的坚韧品质。 | ||||
| 教学过程 | 教学内容 | 教师活动 | 学生活动 | ||
方案设计 (30分钟) |
子任务1:提出方案 提出方案实现小车的智能寻迹功能 |
1.任务引入,引导学生分组讨论; 2.组织分组讨论,对学生的思考过程进行肯定和总结。 |
学生分组自行设计方案,尝试多渠道表达自己的方法,为下一任务引入做准备。 | ||
方案确定 (30分钟) |
子任务2:分析方案优劣并选定方案 1.教师提问:各方案需要用到哪些知识,用到哪些元器件。 |
1.提出问题后,引导学生思考: 2.教师讲解多种方案的可行性。 |
1.学生思考,遇到问题,相互讨论; 2.分享思考过程,解决问题。 |
||
| 45分钟 | 第三环节——任务三 电路原理剖析 | ||||
| 设计意图 | 采用问题及任务引入的方式让学生思考,并设计和分享方案,再讲解电路原理,训练学生分析问题的能力。 | ||||
 |
|||||
| 教学过程 | 教学内容 | 教师活动 | 学生活动 | ||
探究原理 (45分钟) |
子任务:智行追踪巡航车电路原理剖析 学习相关知识 |
引导学生分析电路 讲解信号产生,控制,驱动等各个模块的工作过程 |
分析电路:探究和理解智行追踪巡航车电路原理 | ||
| 135分钟 | 第四环节——任务四 智行追踪巡航车仿真、制作及调试 | ||||
| 设计意图 | 动手做并探究:通过Proteus仿真验证电路,明确相关的知识要点。 实践训练:制作智行追踪巡航车电路,并运行和调试。锻炼学生的动手操作能力,培养精益求精的工匠精神。 |
||||
| 教学过程 | 教学内容 | 教师活动 | 学生活动 | ||
电路仿真 (20分钟) |
子任务1:电路仿真 对设计的电路进行仿真验证 |
过程形成性评价。 | 1.倾听注意事项; 2.规划布线方案; 3.连接电路; 4.观察电路。 |
||
电路制作 (50分钟) |
子任务2:电路制作 制作智行追踪巡航车 |
巡视指导,解决学生的疑难问题 | 1.倾听注意事项; 2.制作电路 |
||
电路调试 (30分钟) |
子任务3:电路调试 分步调试电路,最后进行综合联调 |
过程形成性评价。 | 运行调试,检查电路 | ||
分组展示 (20分钟) |
子任务4:分组展示成果 分组展示各小组的制作成果,并进行答辩 |
对各组学生的成果进行点评、评价 | 聆听各组的成果展示,并进行小组自评与互评 | ||
总结与反思 (15分钟) |
子任务5:总结反思改进 每个同学对案例的形成过程进行反思、总结,提出不足与改进意见 |
引导学生对整个案例的形成过程进行复盘,总结归纳每一组的优势与劣势。 | 回顾整个案例的设计、制作、调试过程,反思收获与体会。 | ||
| 能力训练 | 电路控制方案比较分析与引用能力、技术/器件/方法掌握与应用能力、仪器设备使用操作能力 | ||||
| 教学方法 | 案例引入法、分组讨论法、行动教学法、翻转课堂 | ||||
| 课后训练 | |||||
| 进阶任务 | 1.提升巡航车的性能 对智行追踪巡航车驱动能力、电池等性能做出改进 2.从质量观、工程观、系统观的角度出发,融入产品级的性能提升 |
提出问题,小车的智能巡航有什么不足,如何解决? 对能完成进阶任务的学生加分 |
思考问题,提出改进思路 | ||
| 能力训练 | 新设计控制电路仿真能力、版面仪器布局布线规划能力、电路焊接能力、比较分析归纳总结交流能力、新设计控制电路接线与调试能力、电路板加工制作能力、电子产品系统性开发能力 | ||||
| 教学方法 | 项目驱动、动手实践 | ||||
实验原理及方案
(1) 系统结构
图9 巡航车案例系统结构图
(2) 实现方案
图10 巡航车案例实现方案图
(3) 实验原理
智行追踪巡航车由信号采集、信号处理、电机驱动、电源开关触发电路、12V转5V电源转换电路、手势控制电路、遇障停车电路等七部分电路组成,各部分基本原理如下:
①信号采集电路

图11 巡航车信号采集电路
巡航车的前方左右两侧各装有一组感应电路。当小车正常行驶时,两侧LED均处于跑道白色区域。当车轮偏离跑道的白色区域进入黑色轨道区时,由于黑白反光率的不同,两侧光敏电阻的阻值会发生明显区别,通过分压电路,即可得到高低不同的信号,便于后续电路进行控制。
当车头左偏时,车头右侧的传感器进入黑色轨道区时,如图11所示。左传感器接收到的白色区域反射光的强度仍然不变,所以光敏电阻R13的阻值没有变化;右传感器从白色区域进入了黑色区域,接收的反射光减弱了,所以光敏电阻R14的阻值变小了。
如图11所示,因为R13不变,它所在的由电位器R1、电阻R7、光敏电阻R13所在的分压电路也不变,所以A点的点位VA也不变;因为R14变大,它所在的由电位器R2、电阻R8、光敏电阻R14所在的分压电路也变了,所以B点的点位VB增高了。这两个电位信号被送入后面的信号处理电路,便于进行后续的电压比较与处理。
②信号处理电路

图12 巡航车信号处理电路
当信号采集电路中假设的车头左偏情况发生时,A点的点位VA不变,B点的点位VB增高了。在图12方框所示的信号处理电路图中,第一个集成运放的同相输入端“+”与A点相连,反相输入端“-”与B点相连,因为VA<VB,所以V~+<V-,根据电压比较器的工作原理,可以推导出第一个集成运放的输出端1脚输出低电平;第二个集成运放的同相输入端“+”与B点相连,反相输入端“-”与A点相连,因为VA~<VB,所以V~-<V+~,第二个集成运放的输出端7脚输出高电平。
③电机驱动电路
图13 巡航车电机驱动电路
输出驱动电路由两组完全对称的中功率PNP共射极放大器Q1、Q2组成,其发射极电流最大可达到1.5A。直流电机M1、M2为三极管的集电极负载;D1、D2为电机工作时的指示灯;R11、R12为LED的限流电阻;R3、R4既为前级LM393集电极上拉电阻,也是Q1、Q2的自给偏流电阻;R9,R10为基极抗饱和保护电阻,如图13中方框所示。
当车头左偏时,在前端信号处理电路中,集成运放的1脚输出低电平,7脚输出高电平。与1脚相连的三极管Q1导通,左电机M1运转,指示灯D1点亮;与7脚相连的三极管Q2截止,右电机M2停转,指示灯D2熄灭。左轮向前转动,右轮不转,小车向右做矫正运动,车头回正。
同理,当车头向右偏离轨道时,左光敏电阻R13阻值增大,右光敏电阻R14阻值不变;A点的电位增高,B点的电位不变;比较器的1脚输出高电平,比较器的7脚输出低电平;使Q1截止,左电机M1停转,Q2导通,使右电机M2转动,左轮停右轮前转,小车向左作矫正运动,车头回正。
④电源开关触发电路
图14 巡航车电源开关触发电路
电源开关触发电路由NPN三极管8050和PMOS场效应管AO3401A组成。当外部输入信号Q_out输入低电平时,三极管Q5截止,PMOS场效应管Q4关断,关断整个系统供电;当外部输入信号Q_out输入高电平时,三极管Q5导通,PMOS场效应管Q4开启,为后级整个系统供电。
⑤12V转5V电源转换电路
图15 巡航车12V转5V电源转换电路
因为充电电池配置为+12V,电机工作在+5V,则需要12V转5V电路。电路原理图如图15所示,其中D16是用来作为防反接用的二极管,避免因电源意外接反导致板子损坏。考虑到电机工作时电源电流比较大,选用LM7805线性电源会导致单板发热严重,则U2选用开关电源模块。
⑥手势识别电路
图16 巡航车手势识别电路
手势识别电路由放射式光电传感器检测电路和开关触发电路组成。放射式光电传感器选用的是收发一体的传感器模块TCRT5000,通过调节RP5电位器,能实现1mm~25mm的反射距离;开关触发电路选用的是通用逻辑芯片74LS74(D触发器),在电源刚上电时,74LS74输出低电平,当74LS74单次触发的时候,D触发器输出高电平,实现手势控制后续电源开关触发电路。
⑦遇障停车电路
图17 巡航车遇障停车电路
检测电路使用放射式光电传感器TCRT5000+LM393,当巡航车检测到前方有障碍物,则LM393输出低电平,将该输出连接到74LS74(D触发器)的CLR引脚,则74LS74的Q端输出0,将电源开关触发电路中的Q5截止,Q4关断,从而关闭整个的电源。
每个巡航车前部的左右两边,安装了两套障碍物检测电路,任何一边检测到有障碍物的时候,小车自动断电停车。根据该功能描述,则需要选用一个与门来实现该功能。本设计使用D9的双二极管,组成一个简单的与门电路。
实验报告要求
实验报告包括:实验概述、实验设计、实验过程、数据记录与分析、实验结果与讨论、总结与展望,具体内容如表4所示,报告应该清晰、简洁、逻辑严密,语言要准确、准确表达实验所使用的方法和所得到的结果。
表4 实验报告具体要求
| 组成部分 | 具体要求 | |
| 一 | 实验概述 | 实验目的、实验背景以及实验过程中涉及的主要技术和知识点。 |
| 二 | 实验设计 | 实验方案的设计思路,包括智行追踪巡航车的整体架构设计、关键模块的功能描述以及相互之间的关联。 |
| 三 | 实验过程 | 记录实验步骤,包括硬件组装、系统调试等,并注明每一步操作中遇到的问题和解决方案。 |
| 四 | 数据记录与分析 | 记录实验过程中收集到的数据,包括传感器数据、控制参数等,并进行数据处理和分析,提取出有价值的信息。 |
| 五 | 实验结果与讨论 | 根据实验数据和观察结果,分析智行追踪巡航车的性能表现,评估实验方案的可行性和优缺点,并提出改进意见。 |
| 六 | 总结与展望 | 对整个实验过程进行总结,反思实验中遇到的问题和收获,同时展望智行追踪巡航车未来的发展方向和应用前景。 |
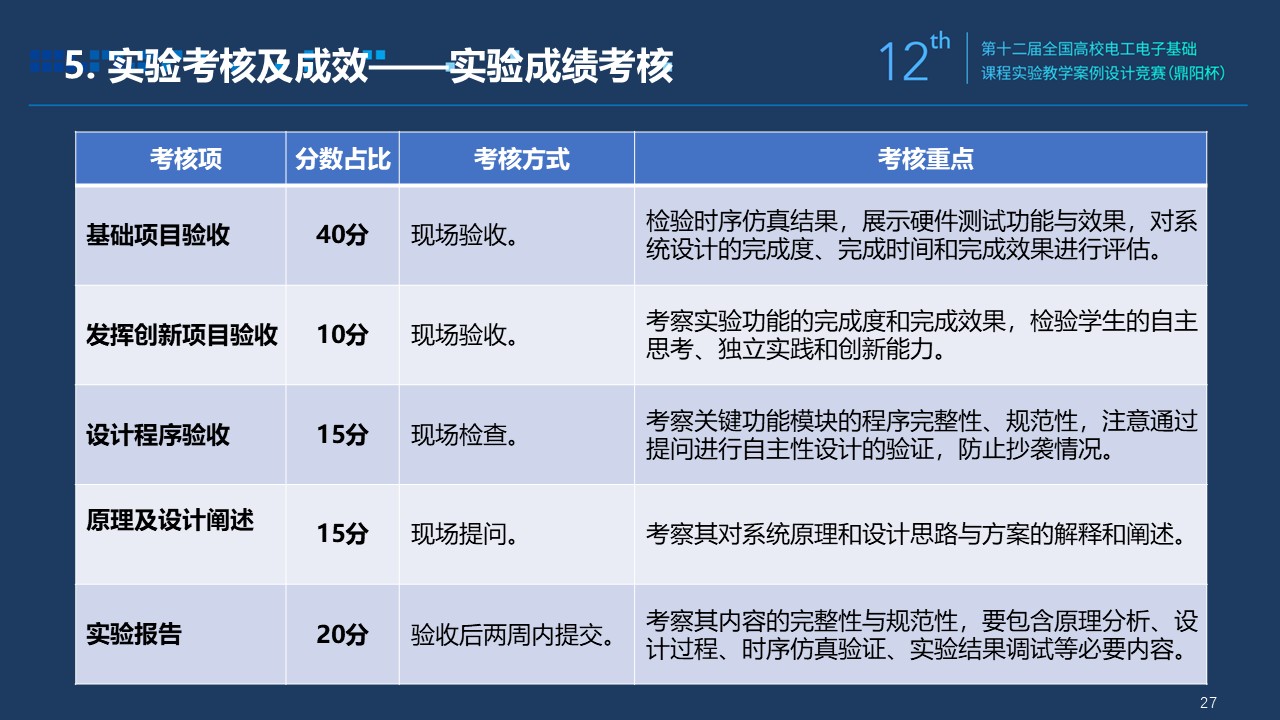
考核要求与方法(限300字)
案例的形成性考核方案由学校和企业共同指定,多维度全流程进行综合考核评价。形成性考核由实操表现(50%)、实验报告(30%)、增值性评价(20%)3部分组成,细化为线上线下混合的11个维度,如表5所示。
表5 线上线下混合式多维度全流程评价体系
| 形成性混合式考核维度 | 分值 | ||
实操表现 (50%) |
交互式仿真训练 | 线上 | 5 |
| 资料检索分析 | 线下 | 5 | |
| 实际操作训练 | 线下 | 20 | |
| 仪器操作能力 | 线下 | 10 | |
| 分析沟通交流 | 线下 | 5 | |
| 整理与收纳 | 线下 | 5 | |
实验报告 (30%) |
知识点自主学习 | 线上 | 5 |
| 知识点掌握程度 | 线上 | 10 | |
| 总结反思 | 线上 | 10 | |
| 课后反馈 | 线上 | 5 | |
拓展增值性评价 (20%) |
课后分级拓展创新 | 线下 | 20 |
案例的考核实施由学生评价(自评和互评)、教师评价以及企业导师评价三方协同,确保评价结果的全面性和客观性。三方协同对整个实施过程中的11个维度进行不同权重的细致评价,确保评价结果的公正性和科学性。最终,通过综合考量各个维度的得分,可以得出学生在该案例中的最终成绩,为他们提供明确的学习方向和改进空间,如图18所示。
图18 三方协同的评价机制
项目特色或创新(限150字)
(1)技术牵引、产品载体:以智行追踪巡航车产品开发为核心,通过电子产品的制作过程传授实际技能,让学生亲身实践电子产品设计与制作的全过程,实现知识与技能的双重提升。
(2)践行CDIO工程教育模式,迭代式开发:践行CDIO工程教育模式,遵循“仿真预演-原型设计-任务实践-拓展进阶-迭代优化”的产品开发过程,培养学生的综合能力和工程实践能力。
(3)**数字赋能,大数据考核:建立1000+**个颗粒化的虚拟仿真资源,融合大量AI和游戏交互技术,实现资源冗余和分层建设。校企三方协同,以大数据跟踪和精准画像形成线上线下的形成性考核。
佐证材料
-
《电子技术》课程标准
-
《智行追踪巡航车设计与装调》教学现场
-
《智行追踪巡航车设计与装调》实验电路
本科《电子技术》课程标准
KCBZ-0012101805-2023
一、课程概要
| 课程名称 | 中文:电子技术 英文:Electronic technology |
课程代码 | 0012101805 | ||||||||
| 课程学分 | 5 | 课程学时 | 共 80 学时,理论50学时,实践30学时 | ||||||||
| 课程类别 | 学科基础教育:⬜数学类 ⬜物理类 ☑电工电子类 ⬜数字创意类 ⬜信息基础类 | ||||||||||
| 课程性质 | 必修 | 适用专业 | 现代通信工程、新能源汽车工程技术、智能制造工程技术 | ||||||||
| 前导课程 | 电工技术、电路基础等 | 后续课程 | 单片机、PLC等 | ||||||||
| 开设学期 | 第一学期 | 第二学期 | 第三学期 | 第四学期 | 第五学期 | 第六学期 | 第七学期 | 第八学期 | |||
| √ | |||||||||||
二、课程定位
本课程是现代通信工程、新能源汽车工程技术、智能制造工程技术等专业的一门专业学科基础教育课程,旨在培养学生科技强国、文化自信、爱岗敬业、勇于创新的思想政治与职业素养,掌握常见电子电路的设计与分析等基本理论与原理,具备电子电路设计、仿真、制作、调试等方面的能力。
三、课程目标
- 素质(思政)目标
1.具备爱党爱社会主义、担当民族复兴大任的爱国情怀;
2.养成对社会主义核心价值观的情感认同和行为习惯;
3.具有爱岗敬业、艰苦奋斗、勇于创新、热爱劳动的劳动精神;
4.养成执着专注、精益求精、一丝不苟、科技强国的工匠精神;
5.具备标准意识、规范意识、安全意识、服务质量职业意识;
6.养成严谨细致、踏实耐心、团队协作、表达沟通的职业素质。
- 知识目标
1.熟悉万用表、示波器、信号发生器、稳压电源的用途、功能及使用方法;
2.掌握常用电子元器件手册的查阅方法;
3.掌握半导体元器件及各种集成电子器件的功能特点和应用方法,了解其主要的功能参数;
4.了解新型器件的功能特点和使用方法;
5.理解常用电子电路的组成、特点、工作原理、分析方法及应用;
6.掌握常用电子电路图的识图、绘制方法;
7.初步学习PROTUES或相关仿真软件的基本应用方法。
- 能力目标
1.具有自主学习能力与资料检索引用能力;
2.具备对仿真系统的应用能力;
3.具有对电子常用仪器设备操作能力;
4.具备对电路分析、设计、制作与调试的能力;
5.具备对新技术、器件、方法的掌握与应用能力;
6.具备比较分析、归纳总结及交流的能力。
四、课程设计
- 课程设计理念与思路
课程融合行业前沿技术,以产品级的智能小车作为综合实训载体:学生在产品场景中依次完成“配备小车视觉系统→供应小车电力系统→装配小车驱动系统→智行追踪巡航车设计与装调→设计车内照明系统→监控小车胎压显示→控制汽车尾灯电路→设计倒车雷达系统”8个进阶项目36个子任务,105个颗粒化的技能点和知识点。各项目都会涉及到对应分立器件或集成芯片的应用,且在应用的同时必将涉及典型应用电路的设计与制作,而在设计制作过程中又必将需要具备相应能力要素和掌握各类器件特别是新型器件的工作原理、功能特性及使用方法。在教学实施过程中将从完成各个子任务开始逐步完成智能小车的各进阶项目,各项目完成后即可组成智能小车,从作品到产品逐级实现。
在实践教学过程中强调创新性,激发学生的创造力和创新思维。在现有的智能小车为载体的实验教学案例基础上,根据不同的专业,拓展设计出适应智能制造工程技术等专业的机器人载体,和适应现代通信工程等专业的智能家居载体,学生在现有的智能小车的载体上提出新的实践方案、解决方案或改进现有技术,来适应本专业的岗位需求。
科学思维、工程伦理、产品规范、大国工匠等思政资源如盐入味,融入整个课程的项目任务和教学活动过程中。
- 课程设计框架
图1 《电子技术》课程设计框架
五、课程内容与要求
表1 课程内容与要求
| 项目 | 学习成果 | 任务 | 知识内容 与要求 |
技能内容 与要求 |
素质(思政)内容与要求 | 参考学时 | ||
| 理论 | 实践 | 合计 | ||||||
项目1 配备小车视觉系统 |
设计与制作LED灯光亮度控制电路 | 1.1 认识常用的元器件 | 1.常见的电阻器 2.常见的电容及电感 3.常见的继电器、开关 |
1.能识别与测试各种电阻器 2.能识别与测试各种电容、电感 3.能识别与测试继电器及开关 4.能理解RC低通、高通滤波器在通信系统中的应用 |
1.工程伦理:企业8s管理 2.创新思维:前沿新技术、新工艺的革新 |
2 | 2 | |
| 1.2掌握常见的仪器仪表的使用 | 1.万用表 2.直流稳压电源 3.信号发生器 4.示波器 |
1.能用万用表对电压、电流、电阻、电路通断进行测量 2.能通过直流稳压电源输出各种正负电压值 3.能通过信号发生器发出各种参数的信号 4.能用示波器测试波形并正确读取波形数据 |
1 | 1 | ||||
| 1.3 LED灯光亮度控制电路的设计与制作 | 设计LED灯光亮度控制电路 | 1.能制作LED灯光亮度控制电路 2.会调试LED灯光亮度控制电路 |
1 | 1 | ||||
项目2 供应小车电力系统 |
设计和制作直流稳压电源电路 | 2.1 认识半导体二极管 | 1.二极管概述 2.二极管的伏安特性 |
1.能识别二极管的外观、符号 2.能区分二极管的分类 3.能掌握二极管的导电特性 |
1.爱国主义:讲述硅谷的故事 2.大国工匠:特斯拉VS爱迪生,锲而不舍的探索精神 |
2 | 1 | 3 |
| 2.2分析二极管电路 | 二极管电路的分析 | 1.能判断二极管在电路中的通断 2.能分析含有二极管的电路 |
2 | 2 | ||||
| 2.3掌握二极管的应用 | 1.二极管的应用 2.特殊二极管 |
1.能掌握二极管的常见应用 2.能识别、应用特殊的二极管 |
2 | 1 | 3 | |||
| 2.4直流稳压电源的设计与制作 | 设计直流稳压电源电路 | 1.能制作直流稳压电源电路 2.会调试直流稳压电源电路 |
2 | 2 | ||||
项目3 装配小车驱动系统 |
设计和制作三极管及其应用电路 | 3.1 认识三极管 | 1.三极管概述 2.三极管的伏安特性 |
1.能识别三极管的外观、符号 2.能区分三极管的分类 3.能掌握三极管的输入、输出特性 |
1.大国工匠:三极管发明者获得诺贝尔奖的故事 2.科学思维:我国半导体领域的前沿技术 |
2 | 1 | 3 |
| 3.2掌握三极管的两大作用 | 1.三极管的三个工作区 2.共射级放大电路 |
1.能理解并掌握三极管三个工作区的工作条件、特点、应用场景 2.能简单的分析共射级放大电路 |
2 | 2 | ||||
| 3.3分析三极管电路 | 常见三极管应用电路的分析 | 1.能判断电路中三极管的工作区域 2.能分析常见的三极管电路 |
2 | 2 | ||||
| 3.4认识MOS场效应管 | 1.MOS场效应管概述 2.TTL和MOS管的区别 |
1.能识别MOS管的外观、符号、分类 2.能区分TTL和MOS管的优缺点,在电路中选择合适的器件 |
1 | 1 | ||||
| 3.5小车行驶电路的设计与制作 | 设计小车行驶电路 | 1.能制作小车行驶电路 2.会调试小车行驶电路 |
2 | 2 | ||||
项目4 智行追踪巡航车设计与装调 |
智行追踪巡航车设计与装调 | 4.1 认识集成运算放大器 | 1.集成运放概述 2.集成运放的电压传输特性 3.集成运放的两个工作区 |
1.能掌握集成运放的基本组成 2.能理解集成运放的电压传输特性 3.能掌握两个工作区的工作条件、特点、应用 |
1.爱国主义:通过卡脖子问题让学生了解国产芯片的现状,增强同学们的民族自豪感 | 2 | 2 | |
| 4.2掌握集成运放信号运算应用 | 1.反相比例运算 2.同相比例运算 3.加法电路 4.减法电路 |
1.能区分两种比例运算电路 2.能计算比例运算电路放大倍数 3.能运用比例电路的两个特例 4.能掌握加法、减法电路的应用 |
2 | 2 | ||||
| 4.3掌握集成运放信号处理应用 | 1.有源滤波器 2.电压比较器 |
1.能掌握有源滤波器的工作原理及应用 2.能掌握电压比较器的工作原理及应用 |
2 | 2 | ||||
| 4.4智行追踪巡航车设计与装调 | 设计智行追踪巡航车 | 1.能制作智行追踪巡航车 2.会调试智行追踪巡航车 |
3 | 3 | 6 | |||
项目5 设计车内照明系统 |
设计和制作车内照明系统 | 5.1掌握数制及其转换 | 1.常见的进制 2.进制的转换 |
能完成常见的进制之间相互转换 |
|
2 | 2 | |
| 5.2认识逻辑门电路 | 1.基本逻辑门 2.复合逻辑门 |
能掌握7种基本的逻辑门 | 2 | 2 | ||||
| 5.3掌握逻辑函数运算方法及其化简 | 1.逻辑运算法则 2.公式法化简 |
1.能掌握逻辑运算的基本法则、定理、定律 2.能运用公式对逻辑函数进行化简 |
2 | 2 | ||||
| 5.4分析和设计组合逻辑电路 | 1.组合逻辑电路的分析 2.组合逻辑电路的设计 |
1.能分析组合逻辑电路 2.能设计组合逻辑电路 |
3 | 3 | ||||
| 5.5车内照明系统的设计与制作 | 设计车内照明系统 | 1.能制作车内照明电路 2.会调试车内照明电路 |
2 | 2 | ||||
项目6 监控小车胎压显示 |
设计和制作小车胎压异常显示报警电路 | 6.1掌握编码器 | 1.编码 2.译码 3.普通编码器 4.优先编码器 |
1.能理解编码和译码的意义 2.能读懂芯片手册,掌握编码器的使用方法 |
1.树立节能环保的意识 2.规范意识的培养及珍惜生命、热爱生命 |
2 | 2 | |
| 6.2掌握通用译码器 | 1.通用译码器 2.通用译码器的应用 |
1.能读懂芯片手册,掌握通用译码器的使用方法 2.能掌握通用译码器的应用电路 |
1 | 1 | ||||
| 6.3掌握字符显示译码器 | 1.数码管 2.字符显示译码器 |
1.能识别和测量两种数码管 2.能使用字符显示译码器控制数码管的显示 |
1 | 2 | 3 | |||
| 6.4小车胎压异常显示报警电路的设计与制作 | 设计胎压异常显示报警电路 | 1.能制作胎压异常显示报警电路 2.会调试胎压异常显示报警电路 |
2 | 2 | ||||
项目7 控制汽车尾灯电路 |
设计和制作控制汽车尾灯电路 | 7.1认识计数器 | 1.计数器概述 2.计数器的工作原理 |
1.能掌握计数器的分类、应用、相关概念 2.能理解计数器的工作原理 |
1.举一反三 2.创新思维 |
2 | 2 | |
| 7.2了解常见的计数器芯片 | 1.74LS161芯片 2.74LS290芯片 |
1.能读懂芯片手册,掌握74LS161、74LS290的使用方法 2.能举一反三,根据芯片手册掌握其他计数器芯片的使用方法 |
3 | 3 | ||||
| 7.3设计任意进制计数器 | 1.反馈法构成任意进制计数器 2.级联法构成任意进制计数器 |
1.能理解任意进制计数器的应用场景 2.能掌握任意进制计数器的设计方法 |
3 | 3 | ||||
| 7.4汽车尾灯电路的设计与制作 | 设计汽车尾灯电路 | 1.能制作汽车尾灯电路 2.会调试汽车尾灯电路 |
3 | 3 | ||||
项目8 设计倒车雷达系统 |
设计和制作倒车雷达电路 | 8.1认识555定时器 | 1.555的组成 2.555的工作原理 |
1.能阐述555定时器的电路组成 2.能理解555定时器的工作原理 |
对科学技术探究、探索的精神,求实求新,应用拓展 | 3 | 3 | |
| 8.2 555定时器的应用 | 1.多谐振荡器 2.单稳态触发器 3.施密特触发器 |
1.能掌握多谐振荡器的应用 2.能掌握单稳态触发器的应用 3.能掌握施密特触发器的应用 |
2 | 2 | ||||
| 8.3倒车雷达系统的设计与制作 | 设计倒车雷达系统 | 1.能制作倒车雷达电路 2.会调试倒车雷达电路 |
3 | 3 | ||||
| 综合设计 | 设计一个实际应用电路,并完成制作 | 应用所学知识、技能点设计综合应用项目 | 6 | 6 | ||||
| 学时总计 | 50 | 30 | 80 | |||||
六、实施建议
- 课程团队
1.课程负责人应由学术造诣深厚、教学经验丰富、教学特色鲜明、具有高级专业技术职务的教师担任,并建立职称、学历、年龄等结构合理的专兼结合的“双师型”教学团队,每40人的标准班配备1名任课教师。课程团队专任教师应具有高校教师资格,电子信息类专业硕士以上学历,一年以上行业企业相关经历。兼职教师应具有电子信息类专业本科以上学历,两年以上企业行业相关经历,具有电子电路设计和开发工作经历并能应用于教学。
2.本课程负责人,副教授,高级技师,在世界500强企业具有两年以上电子产品研发经验,2019年在德国进行为期3个月的职业教育研学。2023年获全国电子信息类专业课程实验教学案例设计竞赛一等奖,2019年在全国“职业教育高质量发展暨数字化说课研讨会”上公开讲授示范课,2019年广东省千百十人才培养校级对象,2019年获得校首届“说课程”比赛一等奖。课程团队由“电子信息工程技术”国家级教学创新团队核心成员担纲,深圳市优秀教师担任主讲教师,华为首任中央硬件部首席专家担任企业导师,团队成员全部具备双师资格。
- 教学条件
1.配置理实一体化实训室
按每个标准班40个学生(一台/2人)配置网络终端设备:计算机,Internet网络设备,proteus虚拟仿真软件,兼顾作为学生课外实践或多场所。
2.电子仪器设备配置
学生每2人一组,每组一套仪器:可调直流稳压电源、万用表、信号源发生器和示波器。
每个学生一套工具:电烙铁、镊子、螺丝刀、尖嘴钳、斜口钳。
全班公用仪器及工具:半导体器件测试仪、吸锡枪等。
- 教学方法与手段
1.以“学生”为中心的问题驱动、项目驱动、过程驱动式教学方法的探索与应用。
2.依托信息化技术开展翻转课堂、混合式教学探索与设计。
3.熟练运用AR、VR等现代信息技术教学手段进行课程教学。
- 教学资源开发与利用
1.教材选用
[1]史仪凯.电子技术(第4版).北京:高等教育出版社,2021.
2.参考资料
[1]课程负责人.电子技术.北京:高等教育出版社,2023.
[2]秦曾煌.电子技术(第7版).北京:高等教育出版社,2009.
[3] 中国大学慕课 https://www.icourse163.org/
学银在线 https://www.xueyinonline.com/
电子技术论坛 http://bbs.elecfans.com
21世纪新锐网 http://www.21xr.com
实用电子制作网 http://www.sydzdiy.com/
电子制作爱好者站 http://www.dzzz.com.cn/
电子制作实验室 http://www.xie-gang.com/
电子制作网 http://www.165v.com/
古龙电子 http://www.glele.net
电子迷的博客 http://deng.blog.dianyuan.com/
电子发烧友 https://www.elecfans.com/
深圳嘉立创 https://www.jlc.com/
3.资源开发与利用
表2 教学资源一览表
| 资源类型 | 资源名称 | 数量 | 基本要求及说明 |
基本教学 资源 |
教学课件(个) | 36 | 每个教学任务配备1个以上教学课件 |
| 教学教案(个) | 36 | 每个教学任务配备1个以上教案 | |
| 微视频(分钟) | 79个 (750分钟) |
针对课程重难点,配备能支撑学生自主学习的教学视频、教学动画、虚拟仿真等微视频 | |
| 习题库(道) | 2620 | 每个教学任务均应配备习题,配备的习题数量要能全面支撑检验学生的学习成效。其中,开放式/非标准答案测验题、案例题等综合应用题不少于20%。每个习题均要提供答案及解析。 | |
| 动画 | 50 | 每个教学任务配备动画 | |
拓展教学 资源 |
2D、3D仿真资源 | 20 | 每个项目、任务配备2D或3D仿真资源、操作视频 |
| 游戏交互式仿真资源 | 40 | 每个项目配备游戏交互式仿真预习系统、考核系统 | |
| VR资源 | 2 | 每个项目分为演示、操作和考核3个模块 | |
| 远程在线实验 | 5 | 开发在线实验云平台 | |
| 活页式项目任务卡 | 23 | 每个项目、任务配有活页式卡片 | |
| 智能小车实训平台 | 1套 | 自主开发智能小车硬件实训系统 |
- 教学评价
1.教学评价思路
课程以学生学业质量为导向,结合课程知识、技能、素质要求,探索形成了教师、行业企业专家、学生评价主体相结合,线上线下相结合,诊断性评价、过程性评价、终结性评价、增值性评价相结合的考核与评价模式。
2.评价内容与标准
表3 教学评价说明
考核 方式 |
过程性考核 (60分) |
终结性考核 (40分) |
增值性评价 (10分) |
|||
平时 考勤 |
项目训练 | 综合 设计 |
网络 学习 |
期末考试 (闭卷) |
项目拓展、大赛获奖等 | |
| 分值设定 | 5 | 20 | 10 | 25 | 40 | 10 |
| 评价主体 | 教师 | 教师、 学生 |
教师、企业 | 教师、学生 | 教师 | 教师 |
| 评价方式 | 线上线下结合 | 线上线下结合 | 线下 | 线上线下结合 | 线下闭卷笔试 | 线上、线下 |
表4 课程评分标准
| 考核方式 | 考核项目 | 评分标准(含分值) |
| 过程性考核 | 平时考勤 | 32次考勤,全勤5分,迟到早退一次扣0.2分,旷课一次扣0.5分。 |
| 项目训练 | 选取5次以上任务训练评价,每个任务4分,完成任务创新拓展4分,完成基本任务3分,未完成基本任务0-1分 | |
| 综合设计 | 作品验收6分,作品答辩4分 | |
| 网络学习 | 从平台导出,课前预习5分,课中活动10分,课后作业10分 | |
| 终结性考核 | 闭卷笔试 | 笔试试卷卷面满分100分 |
| 增值性评价 | 创新拓展、大赛获奖 | 与课程相关的拓展项目5分;电子设计类大赛,一类赛项一等奖10分、二等奖8分、三等奖5分;二类赛项一等奖7分、二等奖5分、三等奖3分;每人增值性评价总分不超过10分 |
- 课程应用与推广
泛雅学习通学银在线,课程网址如下:
https://www.xueyinonline.com/detail/240810318
七、其他说明
- 岗课赛证,突显关键专业能力的培养
对标粤港澳大湾区高新产业电子工程师,融合世界技能、全国大学生电子设计大赛、职业技能证书的能力要求,具备扎实的电子学基础知识和相关的工程技能,能够设计、开发和维护电子设备和系统,满足从学校到岗位衔接的岗位适应力。
- 创新创业,以企业级产品为实训载体
紧跟企业行业前沿技术,注重学生职业能力素质、创新创业意识的培养和提升。
- 双语融入,拓展国际化的资源与视野
开发英语课程资源包,对知识和技能内容的PPT进行英文翻译,对视频资源进行英文制作,开展双语教学。
《智行追踪巡航车设计与装调》教学现场
《智行追踪巡航车设计与装调》实验电路
①信号采集电路
②信号处理电路
③电机驱动电路
④电源开关触发电路
⑤12V转5V电源转换电路
⑥手势识别电路
⑦遇障停车电路