
机器人智能搬运

实验题目:机器人智能搬运
课程简要信息
课程名称:专业综合实习(嵌入式进阶或机器人进阶)
课程学时:60
项目学时:课内60学时、课外60学时
适用专业:电子信息类
学生年级:四年级、七学期
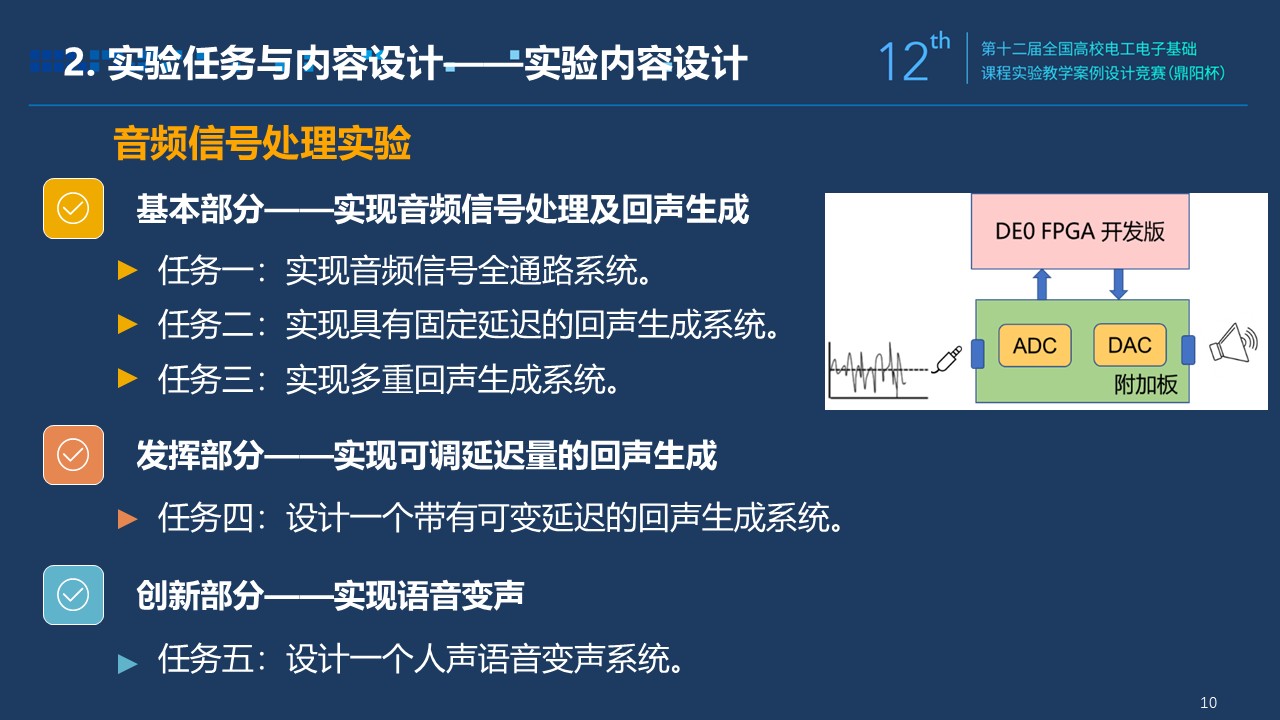
实验内容与任务
设计并组装一款轮式机器人(智能小车),能够实现程序控制自动运行,将不同颜色的色块搬运到相应的位置。
(1)系统采用单片机控制,单片机可选择STM32F103最小系统模块或Arduino NANO模块,颜色识别采用TCS230颜色传感器或摄像头,采用TT马达和L298N驱动模块,路径识别采用TCRT5000红外传感器模块;
(2)设计电路并制作PCB,用于智能小车支架,将车轮、控制器、传感器等全部安装在车架上,实现结构紧凑合理、外接飞线少、操作方便灵活;
(3)调试智能小车,能够按照要求的路径行进,能够实现颜色传感器的数据识别。
(4)编写策略执行程序,能够在不同情况下,实现将变化的任务按照统一要求完成,实现准确、快速。
(5)任务主要是将5个随机摆放的不同颜色的色块,搬运到5个指定位置。为了完成任务,需要采用不同传感器实现路径识别和颜色识别,并能够控制智能小车灵活运动。同时,为了照顾不同层次的同学,设置了两个不同类型的地图模型,高级图和普通图,如图1、图2所示。根据难度区别确定起评分和封顶分数,更好的实现分层教学。
实验过程及要求
实验过程共分9步:
(1)使用EDA软件设计电路图,绘制PCB,在立创进行PCB制作;
(2)查阅颜色传感器TCS230数据手册,了解工作原理,掌握使用方法;
(3)掌握TT马达的原理以及控制器L298工作原理,掌握PWM控制车速的原理,了解PID原理,并尝试使用。
(4)组装智能车,设计合理的传感器安装位置,不断调整,让智能车行驶稳定、准确。
(5)编写各模块程序,分别实现运动控制、颜色传感器数据采集和运动策略执行。
(6)综合调试。将各程序模块合理组合,在地图中进行调试,认真观察搬运过程中出现的情况,选择合理有效的对策进行解决。
(7)记录实践过程中的各个环节,记录出现的各种问题以及解决方案。
(8)项目验收。根据验收要求对作品进行现场验收。
(9)撰写实验报告。按照实验报告要求撰写实验报告。
相关知识及背景
本实践是运用电子信息工程所学知识解决一个综合工程问题的案例,需要基本电路知识、电路设计与电路板制作、传感器及检测技术、信号传输与处理、控制技术、智能算法等知识,结合焊接、组装、测试等实践技能,完成较复杂的工程问题。
本项目以专业服务产业为背景,是大学生创新训练中经典案例,对其技术、方案及应用不断创新,提高学生综合实践能力。
实验环境条件
本实践所需实验环境无特殊需求,材料也是日常常用材料,具体如下:
实验工具:电烙铁、焊锡丝、钳子
实验仪器:直流稳压电源、万用表、数字示波器、笔记本电脑(学生自带)
软件平台:Arduino IDE,Keil uVision5,STM32CubeIDE
电子元器件:STM32F103/Arduino NANO、L298N、TCS230、TT马达、红外循迹传感器、电阻、电容、LED、开关、按键
实验辅助材料:杜邦线、车轮、万向轮、尼龙柱
试验场地:智能搬运场地高级图“钻石图”(1.2m×1.2m)、智能搬运场地普通图“方格图”(1.2m×1.2m),圆柱形色块(直径5cm,高4cm,红、蓝、黄、白、黑)。
搬运地图如图1、图2所示。
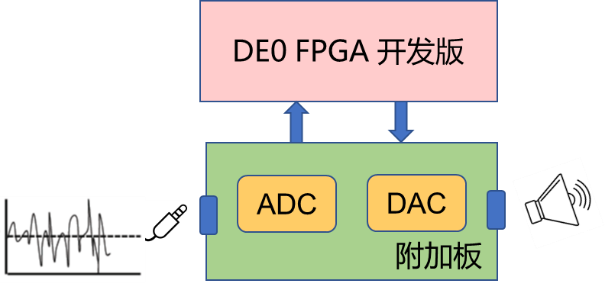
图 1搬运地图-“钻石图”

图 2搬运地图-“方格图”
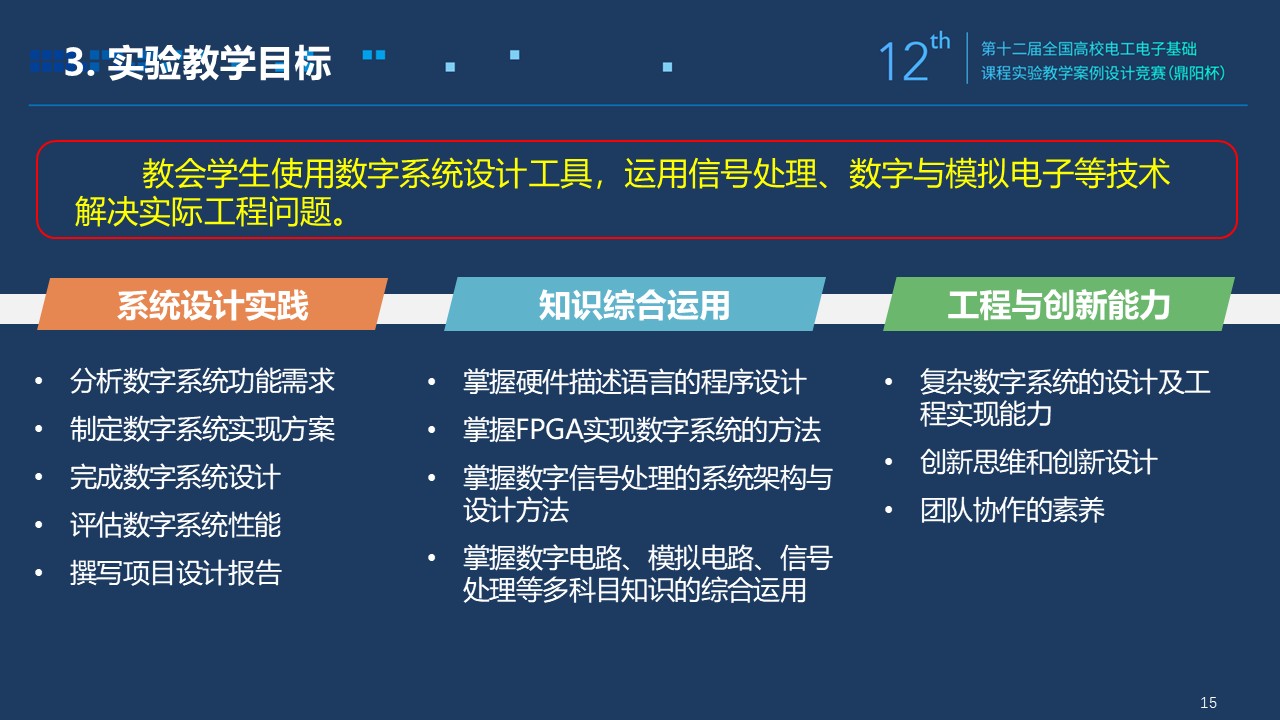
教学目标与目的
教学目标与目的主要体现在三个方面:
知识层面:运用专业知识,设计解决方案,并不断对方案进行优化完善。
能力层面:运用科学的学习方法,不断地扩展知识面,增强独立思考的能力,更新知识结构,并能利用知识进行创新应用,解决工程实践中的问题。
素质层面:培养学生严谨求实、追求真理的科学态度,刻苦钻研、甘于奉献的作风以及专业团队精神,形成正确的人生观和价值观。
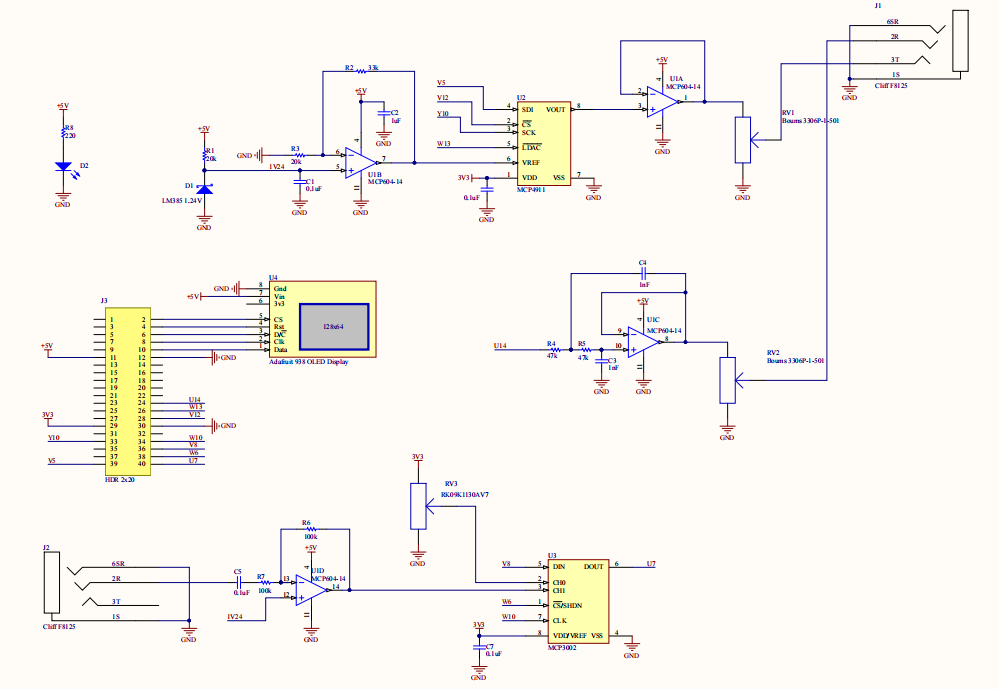
图 3 教学目标递进图
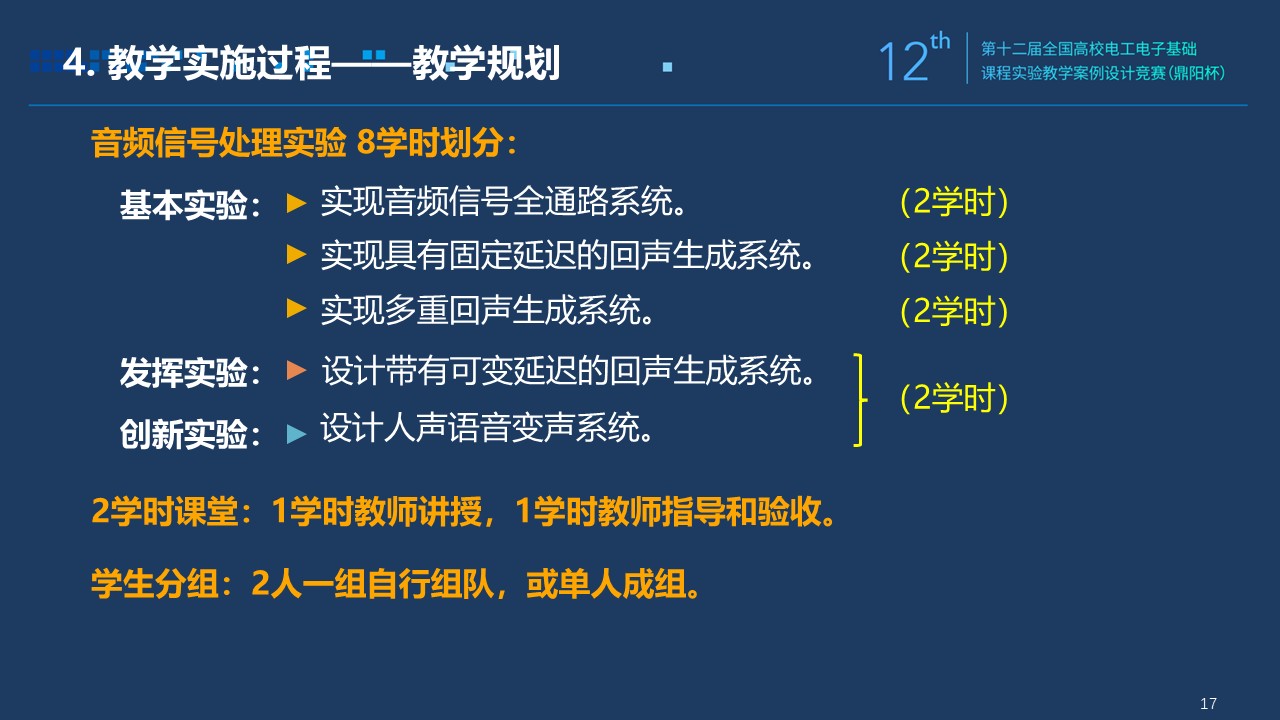
教学设计与实施进程
本实践是一个完整的工程,需要经历方案设计、支架+电路设计、系统组装、硬件调试、软件设计、综合调试,报告撰写等环节。
实践过程采用任务驱动模式,给出基本材料清单,鼓励学生创新设计,选择基础之外的元器件完成任务要求。实施过程中,教学设计如下:
(1)情景带入。将实习任务的工程背景(矿产搬运入仓)展示给学生,与学生讨论遇到的问题和解决方法,将学生带入情景中,激发学生思考。
(2)方案展示。将以往解决方案进行展示,包括任务完成好、一般和失败的案例,讨论各个方案的优缺点,让学生有一定客观认知后开始设计,避免犯基础性错误。
(3)主题讨论。指定部分同学为组织者,对相关技术进行专题讨论,如控制器选择、传感器应用技巧等,激发同学的思考与探索。
(4)阶段检查。根据实践工作完成的标准,在PCB完成、小组组装完成、基本动作调试完成三个阶段进行阶段验收,最后进行综合验收。
(5)系统验收。系统验收采取竞赛式验收方式,即确定验收时间,各验收小组以抽签形式决定验收顺序,验收给三次机会,取最优成绩作为最终成绩。
为了更好的完成实习任务,整个实施过程如下:
(1)项目启动。召开项目启动宣讲会,对实习任务进行详细说明,介绍实习要求,进度安排,指导教师,验收方式等进行宣讲;展示各类方案,让同学们对任务有较为清晰的认知。
(2)实时指导。实习期间,安排值班老师值班,对学生出现的各种问题进行及时指导,并对实习纪律进行把控,保证实习质量。
(3)阶段检查。按照节点对任务完成情况进行检查,了解学生完成情况,并对完成较差同学进行督促和帮扶。
(4)项目验收。以竞赛形式开展验收,验收同学现场演示,其他同学现场观摩,设专职计时老师,现场根据任务完成情况进行打分,保证实习的客观公正。
(5)报告批改。学生上交电子版报告,指导老师检查后,对其问题进行反馈,限时修改,确认没有问题后打印上交。在报告最后一页记录实习的过程成绩、验收成绩、报告成绩和综合成绩,并给出评语。
(6)项目总结。所有实习指导老师集中研讨,对实习过程和实习效果进行总结,总结优点成效,针对实习中出现的问题,提出整改意见,为下次实习改进提供保障,实现持续改进的教学目标。
教学设计与实施过程相辅相成,最终实现持续改进,相互辅助关系如图4。
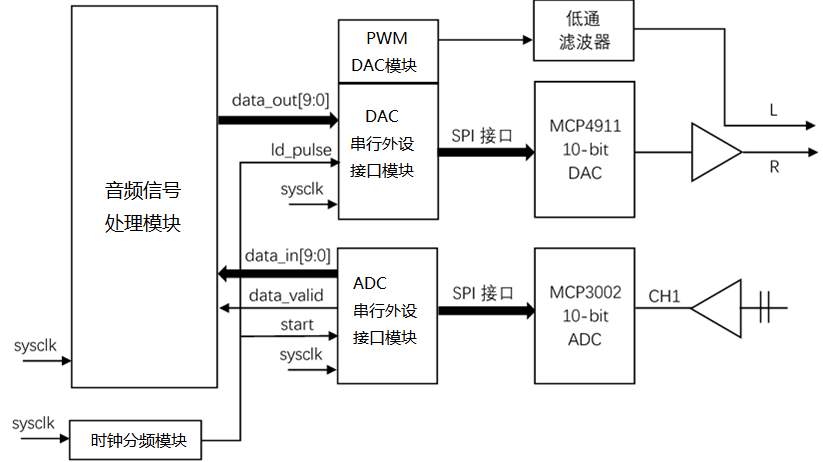
图 4教学设计与实施过程关系图
实验原理及方案
(1)硬件结构
智能小车采用灵活的三轮结构,以PCB为车架,搭载所有元件及模块。两个TT马达带动两个动力轮,一个万向轮作为辅助轮,通过两个马达的正反转,可以实现前进、后退、左右转弯、原地转弯等各种动作。路径识别采用以红外对管为基础的循迹传感器,通过合理的布局,可以识别直路、丁字路、十字路、多路口等要素。采用颜色传感器识别物块颜色,通过解决对比度和阈值的大小,准确的识别颜色种类。系统硬件结构如图5所示。
图 5 系统硬件机构框图
(2)实现方案
A:电源模块
系统采用两节18650充电锂电池供电,输出电压7.4V,送至L298N模块,模块包含两路驱动,可以直接驱动两个马达,还能转换成5V电压输出,供其他模块使用。主控板若采用STM32系列单片机,则再使用一个AMS1117-3.3V模块,输出3.3V为单片机供电。
B:颜色传感器模块
传感器需安装在智能车前方,可以水平向前检测,也可以垂直向下检测,镜头与被测物距离为1cm为宜。TCS230采用IIC总线,使用时,先设置白平衡和定时器,根据输出的脉冲数,计算比例因子,导出颜色参数,根据测试的阈值范围,判断颜色种类。
C:循迹传感器
为了适应地图的不同道路元素,建议安装4个循迹传感器,在智能车前端,呈“一”字型排开,离路面高度0.5-1cm,根据4个传感器反馈的各种不同信号组合,判断道路元素,由单片机制定相应策略进行工作。
D:OLED显示屏
显示屏作为一款辅助器件,用于实时展示测试中各个传感器的状态,各个标志位的参数情况等,辅助更好、更快速地行综合调试。
E:搬运策略
将各传感器和马达编写控制程序模块,供系统调用。策略程序编写前,先根据所选择的地图,制定搬运策略。
在“宝石”地图中,基本策略是将各个色块堆积“进栈”,然后挨个取出,根据颜色不同,选择不同路径去搬运。此方法稳妥,但较浪费时间,可以在到达每一个物块处,先判断是否能将物块直接搬运至目的地,若能,直接搬运,若不能,则再采取“进栈”,供依次取用。
在“方格”地图中,每个色块与目标区基本都可以直接同行,策略选择时,计算每次搬运的位置,或搬运后下次物块位置的选择,这些都会对节约时间起到较大作用。
因地图尺寸已经固定,搬运策略中也可以采取速度变化的形式,在直行路段,采取高速通行的方式,降低整体时间消耗。
图 6实践全流程工作图
实验报告要求
实验报告要能完整体现“搬运机器人”设计工作,要求原理正确、数据可靠、文字精炼、结构清晰严谨、图表规范。主要包括以下几部分:
(1)设计方案:包括搬运机器人所实现的功能、设计方案、路径规划等。
(2)各模块工作原理:分模块详细论述各模块工作原理,包括电路原理图、原理分析、参数计算、流程图等。
(3)调试过程:记录调试方法和过程,记录各阶段测试结果。
(4)完成情况:给出系统总原理图、PCB版图、元件清单、实物图等,对测试数据进行分析和总结,提出改进建议。
(5)结论:对本次课程进行总结,分享自己的心得体会,也可以给出课程建议,以便完善课程内容和教学方法。
(6)附录:程序代码。
考核要求与方法
课程总成绩为100分,最终确定为等级成绩,即优、良、中、及格和不及格五档。成绩由平时成绩、验收成绩和报告成绩3部分组成,涵盖三个大的考核节点:中期考核、验收考核和报告考核,详细情况如表1:
| 成绩组成 | 成绩占比 | 详细构成 | 评分标准 | 备注 |
| 平时成绩 | 20% | 实习考勤 | 按照出勤、解决问题能力,队员配合等方面打分。 | 共100分,乘0.2计入总成绩 |
| 阶段检查 | 按照每次检查打分,未达到按完成量赋分。 | |||
| 验收成绩 | 50% | 搬运精度 | 按照搬运物位置得分,满分50分;颜色位置错误一个扣5分。 | 共100分,乘0.5计入总成绩 |
| 完成时间得分 | 得分=[300秒-任务完成时间(秒)]÷10 | |||
| 返回发车区得分 | 成功返回发车区并停在制定位置得10分,否则为0分。 | |||
| 颜色识别 | 颜色放置错误位置超过3个,说明颜色识别有问题,得0分。没问题得10分。 | |||
| 报告成绩 | 30% | 报告内容 | 内充充实,各部分论述详细,图表用正确,得80分,按照问题酌情减分。 | 共100分,乘0.3计入总成绩 |
| 报告格式 | 格式正确,全文工整得20分,出现问题酌情减分。 |
项目特色或创新
项目特色:
(1)项目工程性强:综合运用专业知识,完成项目的全流程,涵盖方案论证、硬软件设计、组装调试,文件编写等。
(2)激发学生创新:项目不拘泥材料、结构和技术,更大程度发挥学生创新能力。
(3)紧扣专业培养:项目秉承成果导向理念,实习过程以学生为中心,并在每年进行持续改进,实现教学质量的逐年提高。
创新点:
(1)**自己造车:**实践所用机器人小车完全学生自己设计、打板、组装,体验完整工程过程。
(2)**硬、软综合:**既设计硬件电路,又编写软件程序,全方位锻炼专业技能。
(3)**竞赛式验收:**以竞赛形式完成验收,促进学生拼搏意识。
附录:佐证材料
图7 课程在培养方案中的地位
图8 实习报告电子版
图9 实验报告纸质版
图10 实习记录电子版
图11 实习综合成绩评价A
图12 实习综合成绩评价B
图13 学生实习心得
图14 实习现场
图15 学生制作的PCB文件
图16 学生制作的PCB实物
图17 小车实物A
图18 小车实物B
图19 小车实物C
图20 调试现场A
图21 调试现场B
图22 验收视频A
图23 验收视频
图 7 课程在培养方案中的地位
图 8 实习报告电子版

图 9 实验报告纸质版

图 10 实习记录纸质版
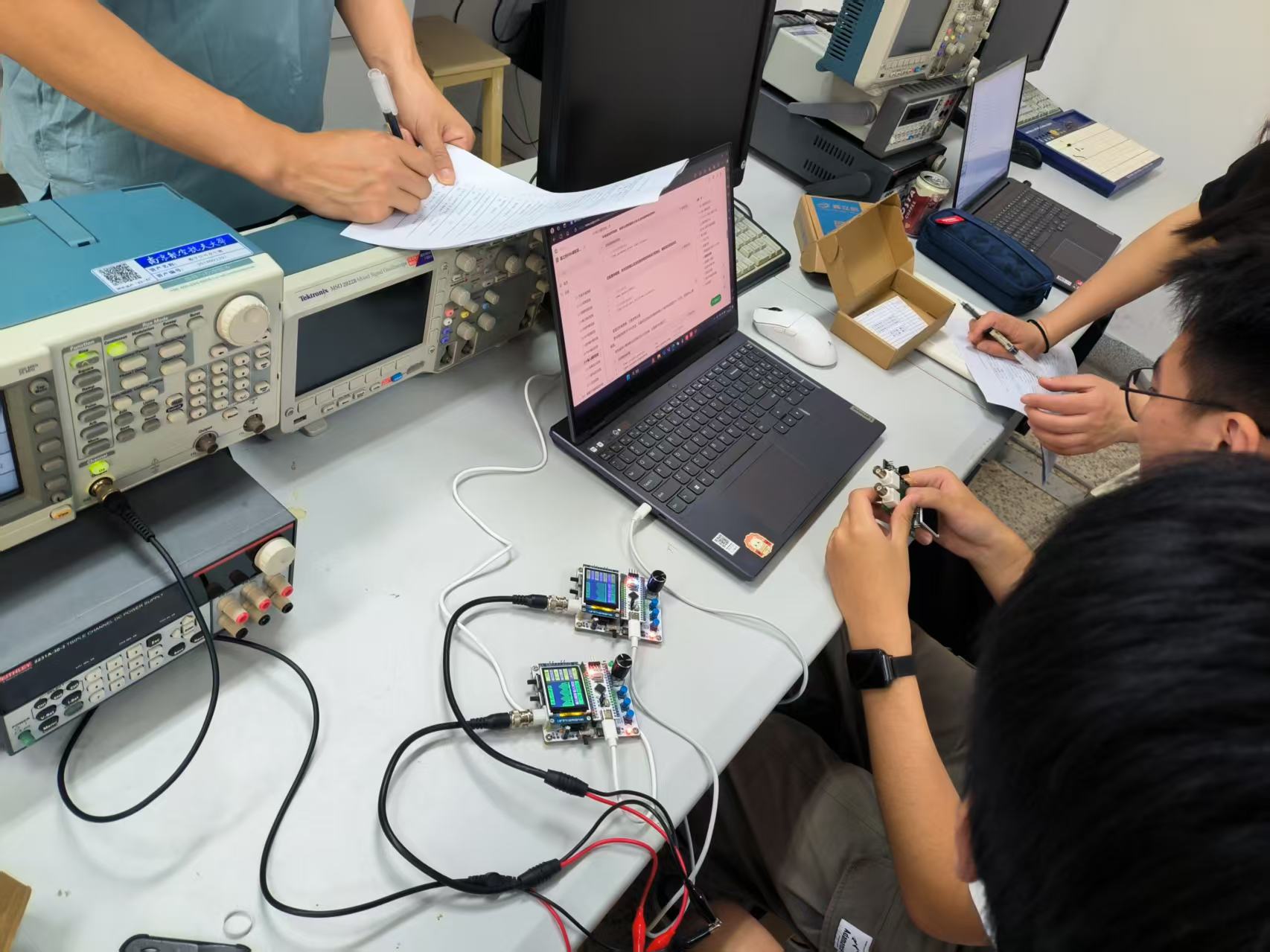
图 11实习综合成绩评价A

图 12 实习综合成绩评价B


图 13 学生实习心得
图 14 实习现场

图 15学生制作的PCB文件

图 16 学生制作的PCB实物
图 17 小车实物A

图 18 小车实物B
图 19小车实物C

图 20调试现场A

图 21调试现场B
图 22验收视频A

图 23验收视频