
“内部招标”模式下智能循迹小车设计






实验题目:“内部招标”模式下智能循迹小车设计
课程简要信息
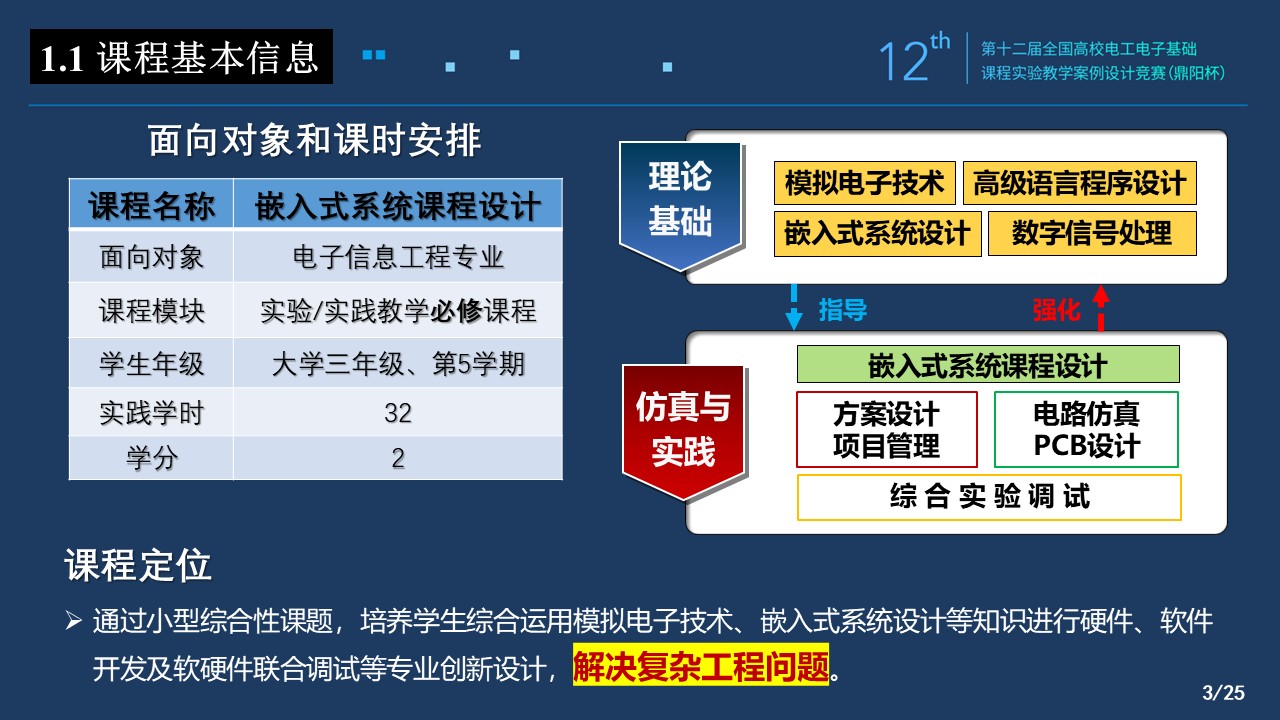
课程名称:嵌入式系统课程设计
课程学时:32学时
项目学时:课内16学时+课外16学时
适用专业:电子信息工程专业
学生年级:大三,第五学期
实验内容与任务(限500字,可与“实验过程及要求”合并)
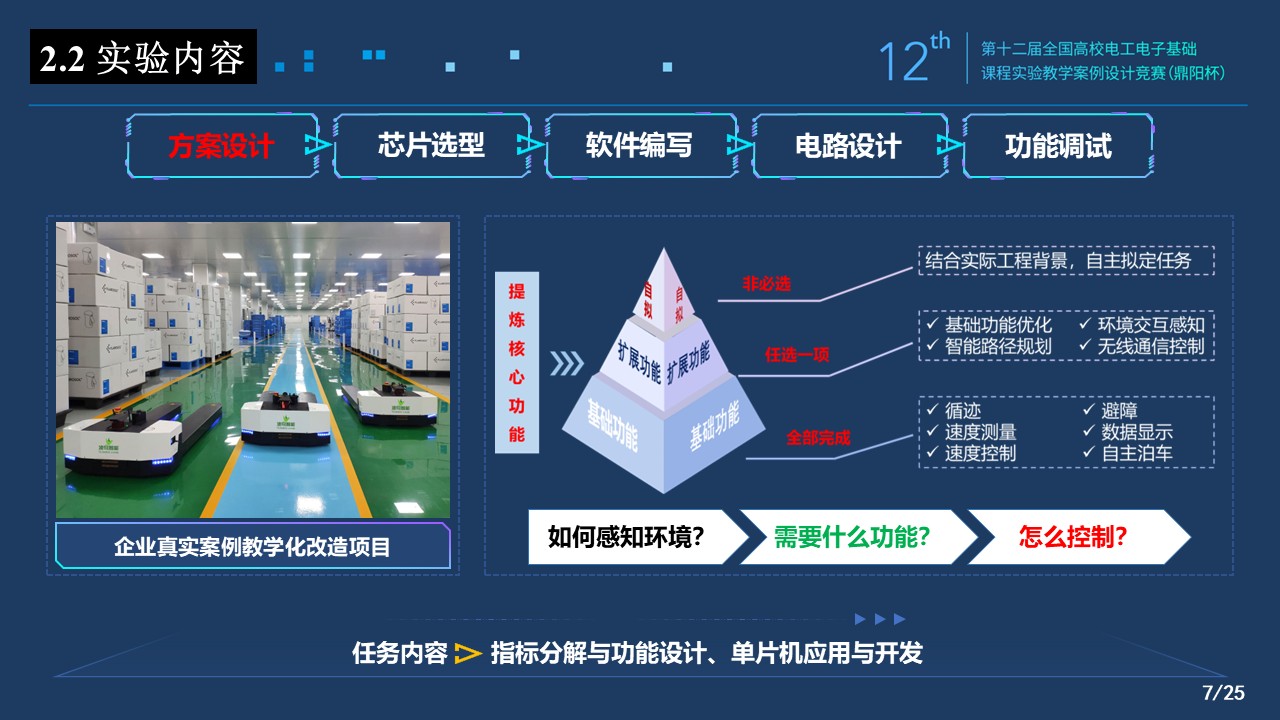
教师将实际工程问题转化为案例包,围绕稳定性、可靠性、准确性等工程要求设计具体技术指标要求,同时发布招标需求;实验教学内容围绕嵌入式系统的设计与实现,引导学生进行需求分析和实验方案设计,掌握智能循迹小车的开发流程和关键技术,培养其在解决复杂工程问题中的实践能力、创新意识及项目管理思维;同时,划分“基础功能、拓展功能、自拟功能”等多层次任务,锻炼学生的思考能力和培养学生科研兴趣;最后,在项目评审环节以方案评审+实物评审的方式,学生将深入了解真实项目流程,锻炼项目开发和管理能力。本课程的核心任务是设计一辆智能循迹小车,能在指定路径上自动行驶,同时形成规范的投标文件和投标样机。具体基础功能包括:
(1) 循迹:小车能够沿着设定轨迹自动行驶,利用传感器检测路线,实现稳定循迹。
(2) 避障:小车具备障碍物检测能力,能根据传感器数据采取相应的避障策略,如减速、绕行。
(3) 速度测量:采用姿态传感器对小车的速度进行测量。
(4) 速度控制:小车能够根据需求调整行驶速度,并在不同路况下保持平稳运行。
(5) 自主泊车:小车能够识别特定区域并自动停车。
(6) 数据显示:实时显示小车的运行速度、角度等相关参数。
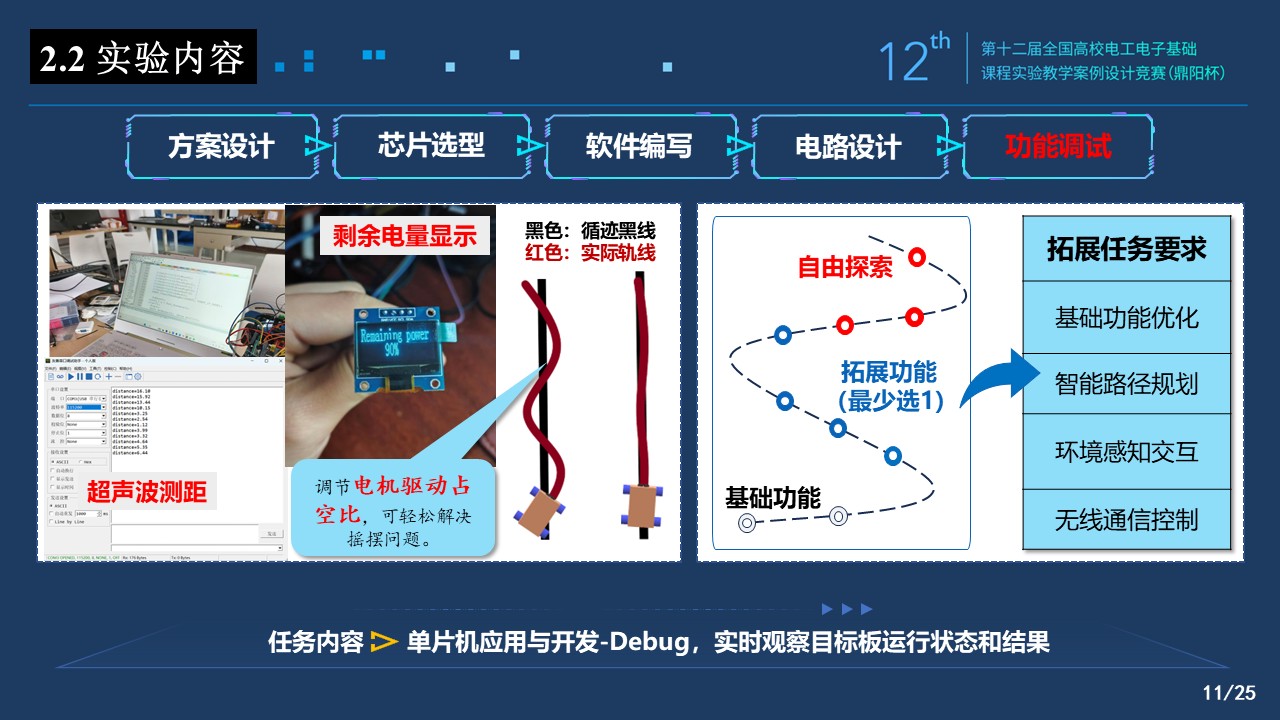
拓展任务:实现至少1个拓展功能或基础核心功能的复杂化设计。
(1) 功能优化:对基础功能进行优化,如PID算法优化循迹,提高小车循迹的精度与响应速度。
(2) 智能路径规划:小车可动态调整路线,不依赖固定轨迹,提高自主决策能力。
(3) 环境感知:增加更多传感器(如激光雷达、摄像头),实现更复杂的环境感知与交互。
(4) 无线控制:通过无线通信(如蓝牙/Wi-Fi)远程控制小车运行状态,设有运行状态指示灯和功能按键,方便用户操作和监视小车状态。
自拟任务(可选):针对项目研发过程中遇到的问题,开展自由探索。
实验过程及要求(限300字)
本实验采用“内部招标”模式,模拟真实工程项目流程,如图1所示。学生将通过招投标流程,完成智能循迹小车的设计与制作,培养项目思维和工程实践能力:
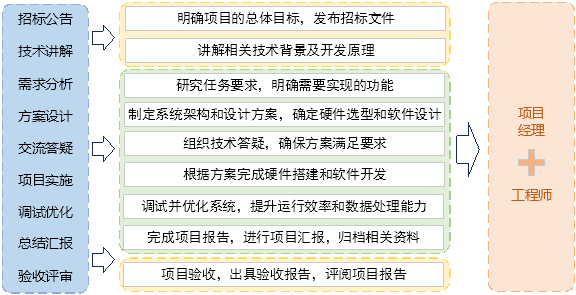
图 1 实验流程图
(1) 发布“招标”需求,模拟真实工程项目流程,明确智能循迹小车的基本功能和技术要求,让学生体验从问题定义、方案设计、成本核算、方案评审、实物验收等工程开发全过程。
(2) 背景选取和需求分析:关注国家战略领域和产业核心技术,结合国家智能制造、自动驾驶等方向,自拟工程背景,明确智能循迹小车的功能需求。
(3) 资料查询与自学预习:查找相关资料,了解核心算法和原理、传感器的特性和选型原则,以及各种传感器之间通信协议的使用。
(4) 方案设计与项目管理:根据项目要求,设计智能循迹小车的硬件架构与软件流程,规划实验进程以及估算开发成本,对项目可行性进行评估。
(5) 器件选择与电路设计:根据所学知识和功能需求,选择合适的元器件,并设计相应的硬件电路,包括主控的核心电路以及外设传感器电路等。
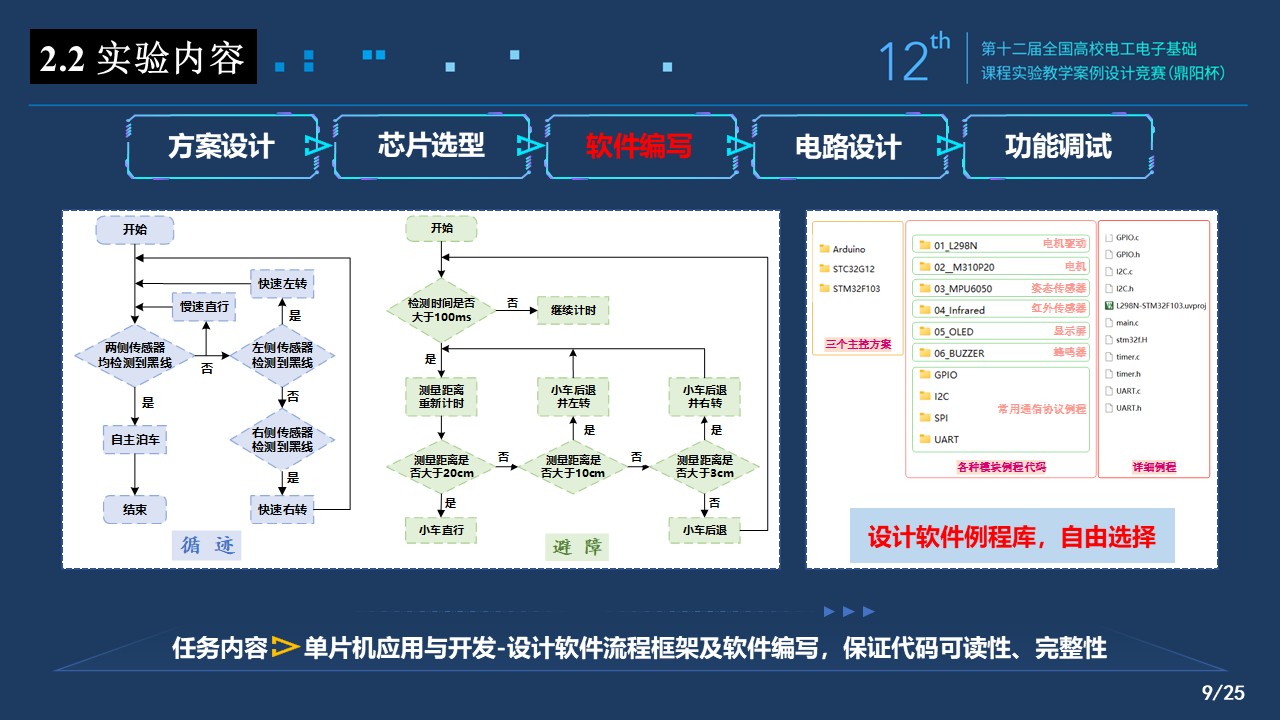
(6) 软件开发与功能调试:编写循迹、避障、速度控制等核心功能的代码,实现小车的智能控制,并通过串口调试等功能测试系统稳定性。
(7) 现象观察与数据测试:观察小车在不同环境、不同路径下的循迹能力,测试避障响应速度、运动稳定性、无线控制等性能指标。
(8) 实验报告撰写:总结实验过程中遇到的问题及解决方法,对实验结果进行分析和评价,并提出优化解决方案。
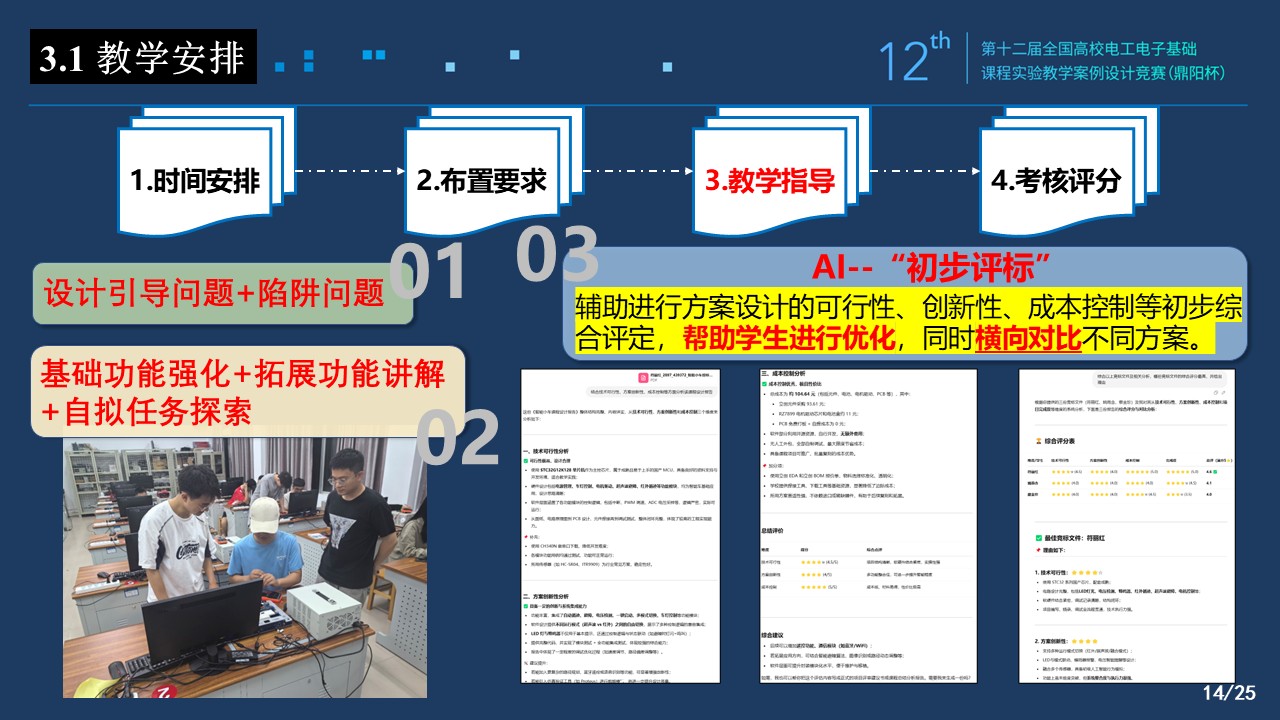
(9) 跟进项目投标:在Canvas系统上进行投标。在此阶段,由AI作为“评标委员会”辅助进行方案设计的可行性、创新性、成本控制等初评综合评定。最后进行实物验收,包括代码验证、功能测试、实物演示、结题答辩。
相关知识及背景(限150字)
随着工业化和智能交通技术的发展,自动驾驶汽车在智能物流、无人配送、智能巡检等领域的应用日益广泛。作为未来交通的重要方向,自动驾驶技术能够替代人类驾驶员,实时感知复杂的交通环境,并自主完成路径规划、避障决策和车辆运动控制。相比传统人工驾驶,智能汽车不仅能显著提升运输和巡检效率,还能降低运营成本,减少人为失误带来的安全隐患。
实验环境条件
项目实施需要的环境条件如下:
(1) 实验教学平台
-
采用自主设计的嵌入式教学开发板作为核心实验平台,支持学生进行硬件与软件的开发与调试。
-
结合Canvas线上教学系统,实现课后交流与互动,支持作业提交、批改,以及项目进度的实时跟踪与管理,提高教学效率。
(2) 线上虚拟仿真平台
-
利用本校自主研发的远程虚拟仿真平台,为学生提供便捷的远程实验环境。
-
学生可通过网络进行虚拟仿真操作,验证实验方案的正确性与可行性,提升学习效率及实践能力。
(3) 企业合作与硬件自定义
-
在嘉立创平台创建课程群,支持学生自主设计PCB板,培养实践创新能力。
-
实验室配备完善的硬件开发工具与设备,包括嵌入式教学开发板、万用表、多功能电源、电路元件模块等,确保实验顺利开展。
-
提供必要的仪器与仪表,支持学生完成硬件设计与调试工作,确保项目的高质量实施。
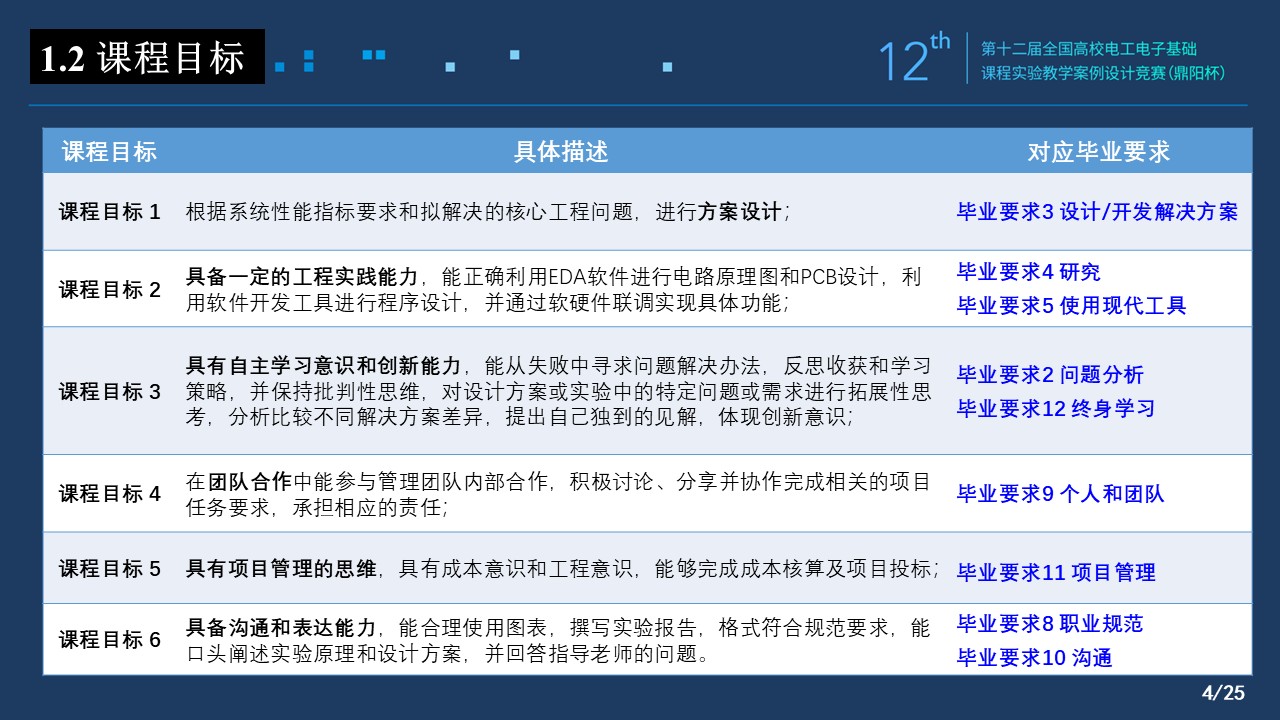
教学目标与目的(限150字)
(1) 方案设计与优化:依据招标文件要求,制定智能循迹小车的技术方案,并对其可行性、经济性和性能进行评估与优化,以满足项目需求。
(2) EDA工具应用:熟练运用EDA软件进行电路设计与PCB布局,确保硬件设计符合技术标准,提高产品可靠性。
(3) 项目管理与成本核算:具备项目成本估算与核算能力,能够合理管理项目进度与资源,确保项目在预算范围内按时完成。
(4) 系统软件设计:熟练运用嵌入式开发工具进行系统软件设计,能够完成功能模块的编码、调试与测试,实现系统功能的完整实现。
(5) 系统调试与测试:能够利用软件模拟工具和硬件在线仿真工具进行系统调试与测试,发现并解决系统运行中的问题,确保系统的稳定性与可靠性。
(6) 成果展示与技术汇报:编写项目文档,制作竞标演示材料,清晰表达设计思路,提升技术交流与答辩能力。
教学设计与实施进程
本案例采用 “内部招标”模式,模拟实际工程项目的竞标流程,分为招标需求发布、背景调研、方案设计、成本核算、项目管理、项目评审等6个环节,学生通过小组协作完成智能循迹小车的设计、实现与优化。
1.教学设计如下:
(1) 课堂知识讲解、方法引导、背景介绍
-
以“大众排放门”事件为切入点,引导学生思考工程伦理与职业素养的重要性,为后续学习奠定正确的价值观。
-
系统讲解智能循迹小车的设计原理,深入解析各个功能模块的作用及其相互关系;结合嵌入式系统设计的理论知识,帮助学生构建完整的知识体系,为后续实践奠定基础。
-
引导学生掌握智能循迹小车的系统设计方法,包括如何根据性能指标选择合适的元器件、设计系统框图以及绘制软件流程图等;通过案例分析与实践指导,培养学生解决实际工程问题的能力。
-
重点讲授芯片选型与EDA软件的应用,帮助学生快速理解嵌入式系统的设计理念与开发流程;结合实际操作演示,提升学生对硬件设计与软件开发的综合运用能力。
-
鼓励学生结合国家战略需求与产业核心技术,自拟智能循迹小车的设计背景,探索解决复杂工程问题的创新方案;融入课程思政教育,引导学生树立科技报国的责任感与使命感,培养其成为具有家国情怀的工程技术人才。
(2) 实验资源、研讨主题、观察节点、验收重点、质询问题等方面设计
-
提供实验室的硬件设备(如嵌入式开发板、测试仪器等)和软件工具(如EDA软件、开发环境等),为学生创造良好的实验条件;教师将全程提供实验指导与辅导,帮助学生解决设计与调试中的问题。
-
建立软件例程库和电路功能库,支持学生根据自拟背景自由选择功能模块,按需组合,培养其创新设计与实践能力;围绕智能循迹小车的设计与实现,组织学生进行系统方案设计、元器件选型、硬件设计与软件开发等方面的深入讨论;通过小组研讨与案例分析,激发学生的思考与创新,提升其解决复杂工程问题的能力。
-
重点考察学生在系统设计、软硬件调试与测试等环节的表现,评估其动手能力与问题解决能力;对作品的功能实现情况进行全面观察,确保设计目标的达成。
-
验收将依据招投标评审标准,重点考察学生对项目任务的完成情况,包括作品的功能性、稳定性与优化质量。同时,评估其技术方案的实施效果、成本控制与资源管理能力。课程设计报告的撰写质量与答辩表现也将纳入评分体系,确保通过多维度的综合评价,全面反映学生的学习成果与工程实践能力。
-
质询环节将围绕学生在设计过程中遇到的挑战、解决问题的方法与思考展开讨论,考察其分析与总结能力;同时,将深入探讨学生对设计原理与实现细节的理解,确保其掌握核心知识与技能。
2.教学实施进程
(1) 实验实施进程的各个环节:
-
任务安排:依据招投标流程,明确项目任务的目标与技术要求,引导学生理解项目的整体架构、实施路径与核心设计要点,确保团队能够精准把握方案方向。
-
预习自学:学生通过查阅相关资料、技术文献和行业标准,深入理解实验涉及的核心技术与实现原理,为方案设计和实施奠定理论基础,提高标书编写质量。
-
技术讲解:教师针对项目实施涉及的关键技术、工程标准及评审指标进行讲解,帮助学生掌握各模块的设计原理与优化方法,提升理论与实践结合的能力。
-
方案研讨:学生团队围绕技术方案、成本控制、优化策略等问题进行研讨,在竞标环节模拟实际工程决策过程,通过交流激发创新思维,提升团队协作能力。
-
项目实施:学生依据中标方案进行硬件搭建与软件开发,完成电路连接、程序调试及系统优化,掌握实验设备的应用方法,提高实践动手能力与工程问题解决能力。
-
项目验收:教师对学生的实验成果进行验收与评估,检查是否符合技术指标和实验设计要求,并提供反馈意见与改进建议,帮助学生优化设计方案,提高工程可行性和竞争力。
-
总结汇报:各团队通过竞标汇报形式向评审小组及全班展示项目成果、实施过程及经验总结,培养团队的项目陈述能力与技术表达能力,同时促进不同团队间的技术交流与经验共享。
-
报告评审:教师对学生提交的设计报告进行评审与打分,重点考察方案的完整性、可行性分析、成本控制及优化策略,确保学生对项目实施全过程的深入理解,并符合工程项目管理要求。
-
长期目标建立:鼓励学生自主调研相关企业,形成需求报告;撰写强相关实用新型专利;申报大学生创新创业训练项目;参加任意强相关学科竞赛。针对不同学生特点从四个维度实现教学闭环。
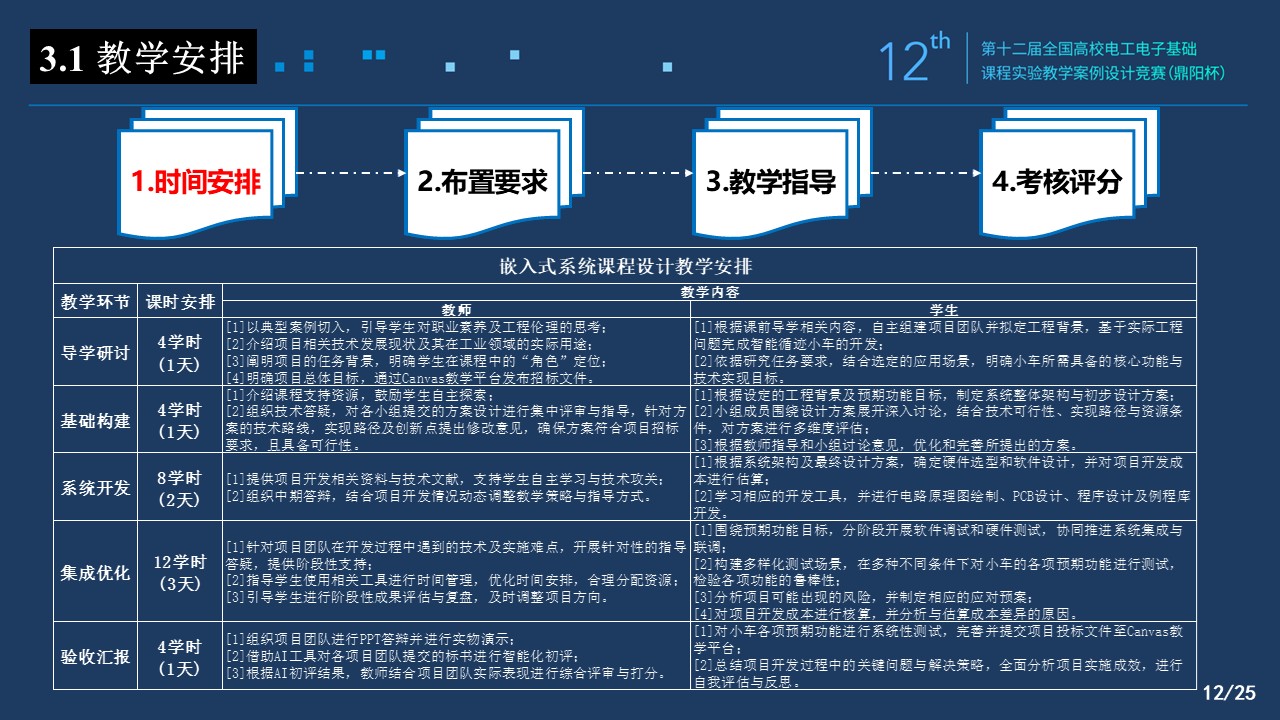
(2) 嵌入式系统课程设计实验教学安排如下:
教学 环节 |
课时 安排 |
教学内容 | |
|---|---|---|---|
| 教师 | 学生 | ||
| 导学研讨 | 4学时 (1天) |
|
|
| 基础构建 | 4学时 (1天) |
|
|
| 系统开发 | 8学时 (2天) |
|
|
| 集成优化 | 12学时 (3天) |
|
|
验收 汇报 |
4学时 (1天) |
|
|
教师和学生的角色分工如图2所示。通过精心设计的多环节教学过程,从课堂讲授、自主探究、小组讨论以及思维引导,使学生全面掌握嵌入式系统设计的理论知识和实践技能,培养其解决工程问题的能力和终身学习的意识。
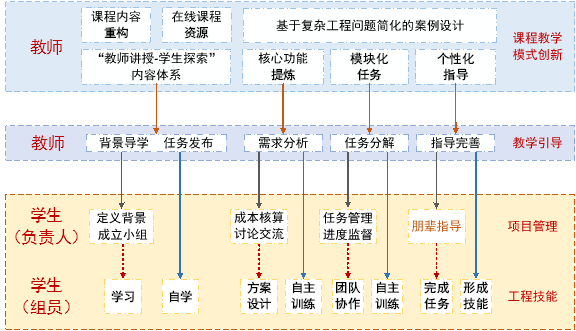
图 2 教师和学生的角色分工
实验原理及方案
(1) 系统结构
以STM32F103C8T6为主控处理器,按照功能将总体电路分为感知模块、控制模块、显示反馈模块、执行模块及电源管理五大模块,模块框图如图3所示。
图3 总体功能框图
(2) 元器件选型及原理
- 红外传感器
本系统采用4路红外循迹/避障传感器,该传感器的探测距离可通过电位器旋钮进行调节,有效测量范围1mm-60cm,工作电压为3.3V-5V。该传感器具有干扰小、便于装配、使用方便等特点。环境数据采集是实现精准控制和自主导航的关键环节,主要依赖4路红外传感器模块来获取轨迹、障碍物等信息。该传感器对环境光线适应能力强,确保在不同光照条件下都能稳定工作。每个红外传感器都具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,同时信号输出接口输出数字信号(一个低电平信号),用于后续数据分析和控制决策,红外传感器的部分电路如图4所示。
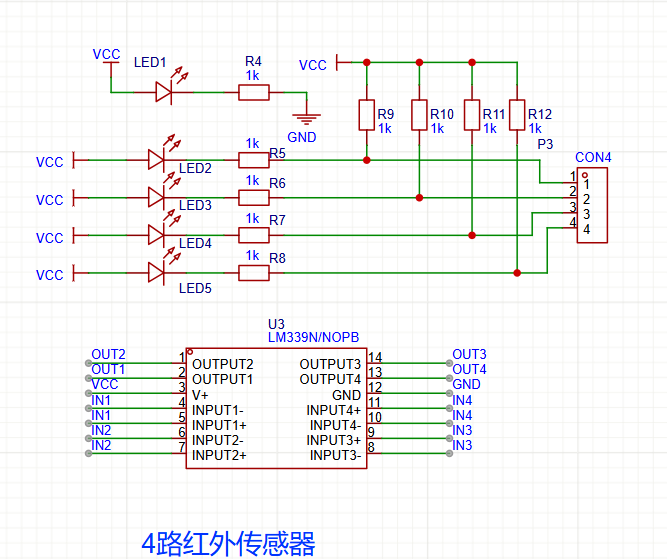
图4 红外循迹/避障传感器电路图
- 电机驱动
本系统采用双H桥L298N电机驱动芯片,该芯片是一款可接受高电压(工作电压可达46V)、大电流(输出电流最高可至4A)双路全桥式电机驱动芯片,采用 Multiwatt 15脚封装,适用于智能循迹小车的电机控制。L298N电机驱动通过驱动两个直流电机,支持PWM(脉冲调制)调速,控制电机的转速和转向,实现精准运动。它接受标准TTL逻辑电平信号,并配备两个使能控制端,可通过板载跳帽动态调整电路的运行模式,即便在无输入信号的情况下,也可灵活控制电机的启停状态。L298N 具有独立的逻辑电源输入端,并内置78M05稳压芯片,使内部逻辑电路在低电压下稳定运行,同时可向外提供5V 逻辑电压。值得注意的是,为了防止稳压芯片损坏,当驱动电压超过12V时,应通过外部5V接口独立供电,以确保系统的安全性与稳定性。L298N电机驱动的电路如图5所示。
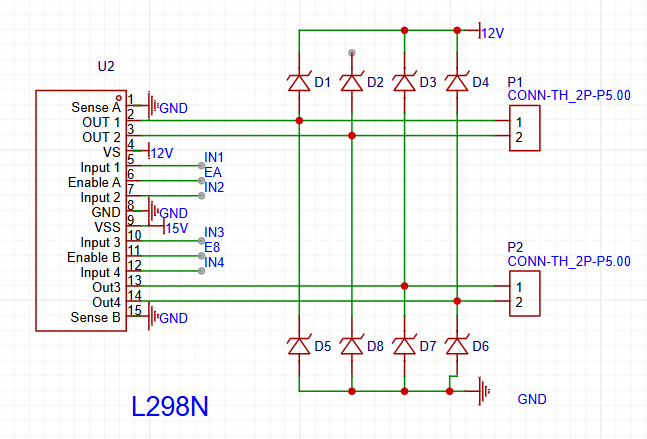
图5 L298N电机驱动电路图
L298N控制直流电机运转的逻辑如表1所示。
表1 L298N控制逻辑
| ENA | IN1 | IN2 | 直流电机状态 |
|---|---|---|---|
| 0 | X | X | 停止 |
| 1 | 0 | 0 | 制动 |
| 1 | 0 | 1 | 正转 |
| 1 | 1 | 0 | 反转 |
| 1 | 1 | 1 | 制动 |
- 姿态检测
姿态检测采用的是MPU6050姿态传感器,该传感器是一个6轴惯性测量单元(IMU),集成了3轴加速度计和3轴陀螺仪,可以测量X、Y、Z轴的加速度、角速度参数,并通过数据融合和处理计算出小车的姿态角,实现精确的姿态感知和控制。MPU6050具备高精度、低功耗的特点,广泛应用于运动控制、姿态检测及导航系统。MPU6050姿态传感器的部分电路如图6所示。MPU6050姿态传感器获得小车姿态数据的步骤如下:
a) 采用I2C总线方式连接MPU6050与主控处理器STM32F103C8T6,实现数据通信;
b) 在STM32F103C8T6上初始化I2C总线,定适当的波特率,确保MPU6050的数据能够稳定读取;
c) 初始化MPU6050,包括解除休眠、设置加速度计和陀螺仪量程、滤波、配置采样率等操作,保证传感器正常工作;
d) 读取MPU6050寄存器中的加速度数据和角速度数据,对原始数据进行预处理(如去噪、归一化等),以提高测量精度;
e) 采用Kalman滤波,结合加速度计和陀螺仪的数据,优化姿态解算,用于小车姿态控制和轨迹修正。
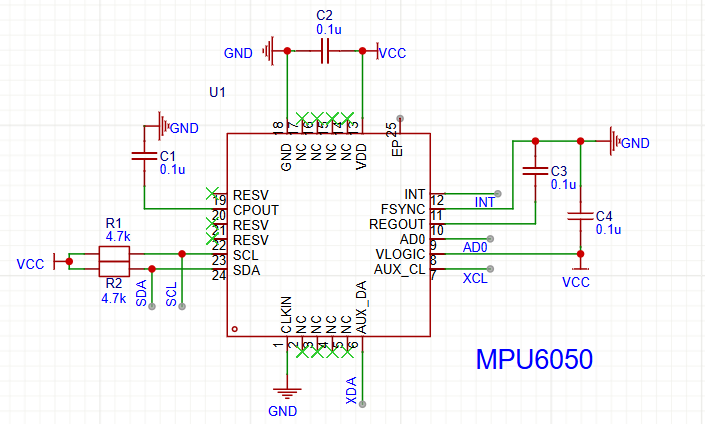
图6 MPU6050电路图
- 运动控制
小车的循迹控制核心是PID控制算法,用于优化循迹效果,使小车能够平稳沿着轨迹行驶。PID 控制(比例-积分-微分)是一种闭环控制算法,根据红外传感器检测小车运行的状态计算误差,从而产生相应的PWM波,调整左右电机的速度差,从而实现小车转向,使其保持在期望轨迹上。PID控制的计算公式如下:

 为当前误差,即小车偏离黑线的程度;
为当前误差,即小车偏离黑线的程度; 、
、 、
、 为PID控制的比例环节、积分环节和微分环节系数。PID
控制的关键是参数整定,通过实验调试使小车在不同环境下都能稳定循迹,避免出现震荡、偏移过大或滞后的问题。
为PID控制的比例环节、积分环节和微分环节系数。PID
控制的关键是参数整定,通过实验调试使小车在不同环境下都能稳定循迹,避免出现震荡、偏移过大或滞后的问题。
小车的运动控制信号是通过PWM(脉宽调制)技术产生的。主控处理器STM32F103C8T6内置定时器产生的PWM可控制小车的转速和方向,通过控制信号的占空比来调节电机的输出功率,从而实现电机的加速、减速和精确控制。此外,主控处理器通过读取传感器数据,结合 PID 控制算法 调整 PWM 信号,以实现小车的精准循迹与避障控制。
- 屏幕显示
本系统采用SSD1306 OLED显示屏进行信息可视化,提供实时数据反馈。OLED屏幕通过I2C总线驱动,仅需SDA、SCL、GND以及VCC四个引脚即可完成通信和供电,可用于实时显示小车的速度和角度等运行状态相关信息,电路如图7所示。
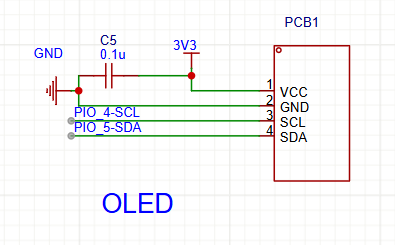
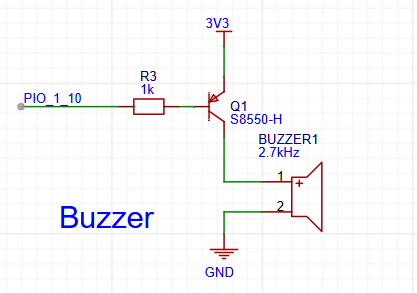
图7 OLED屏幕驱动电路 图 8 蜂鸣器驱动电路
- 蜂鸣器驱动
蜂鸣器使用GPIO控制,电路如图8所示。在程序设计中,小车通过定时器中断 监测运行状态,当小车到达指定的行驶轨迹时系统会将状态变量设置为Warning,并触发蜂鸣器鸣叫,以提醒用户。蜂鸣器鸣叫由GPIO端口控制高低电平翻转实现。其中通过调节蜂鸣器的上电频率,改变其鸣叫的音调(音量)高低,通过PWM模式控制蜂鸣器,可以更加精准地调整警报音效,使小车的状态提示更加直观和高效。
(3) 方案设计
本系统需要使用的外设较多,因此,每种通信使用的总线协议需要分配清楚。
a) 主控处理器与红外传感器通信方式采用GPIO,红外传感器选择4路循迹传感器模块,既可实现小车的循迹功能,又能实现避障功能。该传感器对环境光线适应能力强,有效距离范围1mm-60cm,且可通过电位器旋钮调节检测距离,探测角度为35°,使用宽电压LM339比较器,信号干净,驱动能力强。
b) 主控处理器与屏幕通信方式采用I2C,SPI、MPU等方式驱动的屏幕普遍价格高,很多为TFT触摸屏(如ILI9325)。屏幕只是用于展示数据,对交互需求不用太高,使用I2C连接的OLED屏幕,便宜且便于控制。
c) 主控处理器与姿态传感器通信方式采用I2C,姿态传感器采用MPU6050,采用I2C方式通信可减少GPIO资源的占用,且可使用Kalman滤波处理传感器获得的数据,并结合PID对小车进行平衡、姿态调整。
d) 主控处理器与电机驱动之间使用GPIO控制和PWM调速,电机驱动采用L298N,发热量低,抗干扰能力强,驱动能力强,既可驱动直流电机也能驱动步进电机,具有过热自断和反馈检测功能,可对电机进行直接控制,通过主控芯片的I/O输入对其控制电平进行设定,就可为电机进行正转反转驱动,操作简单、稳定性好,可以满足直流电机的大电流驱动条件。
e) 主控处理器与蜂鸣器之间采用的是GPIO方式通信,采用的是一个低电平无源蜂鸣器,需要采用2k-5k的方波驱动,声音频率可控。
(4) 实施方案
- 系统运作流程
系统运作整体流程图如图9所示,主要分为感知模块、控制模块、执行模块和交互显示模块。
图9 软件流程图
- 芯片设计
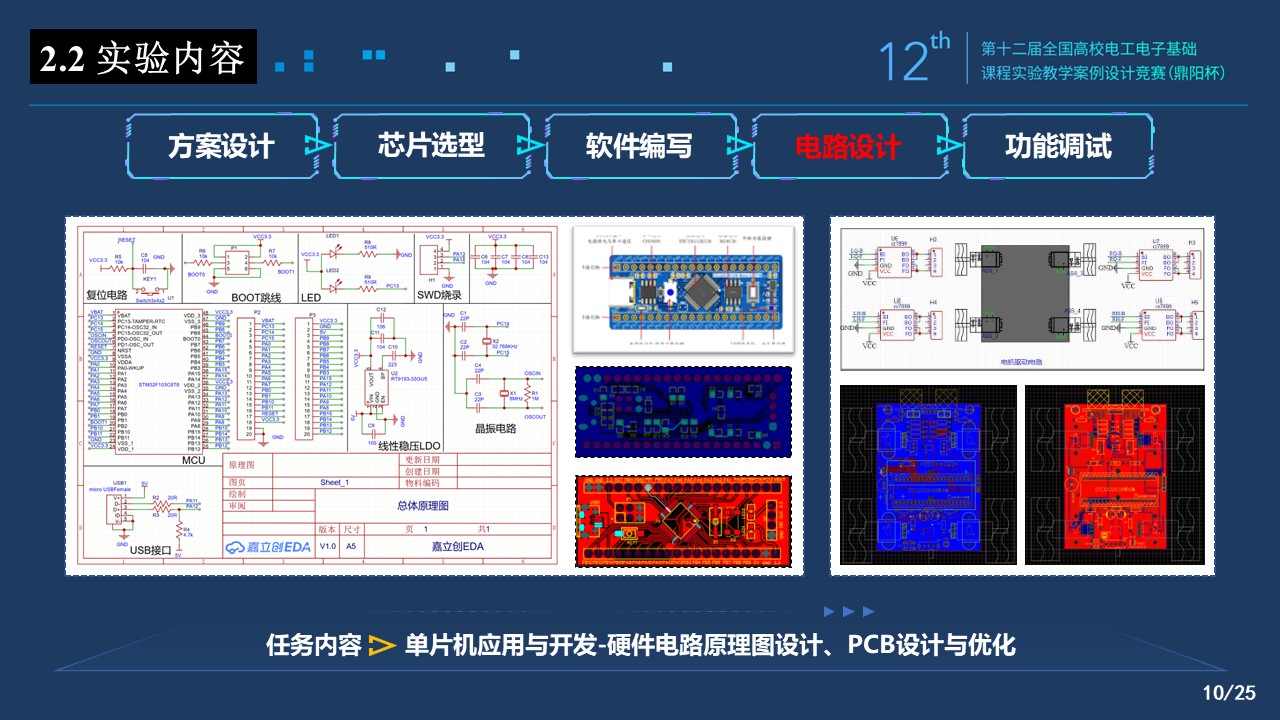
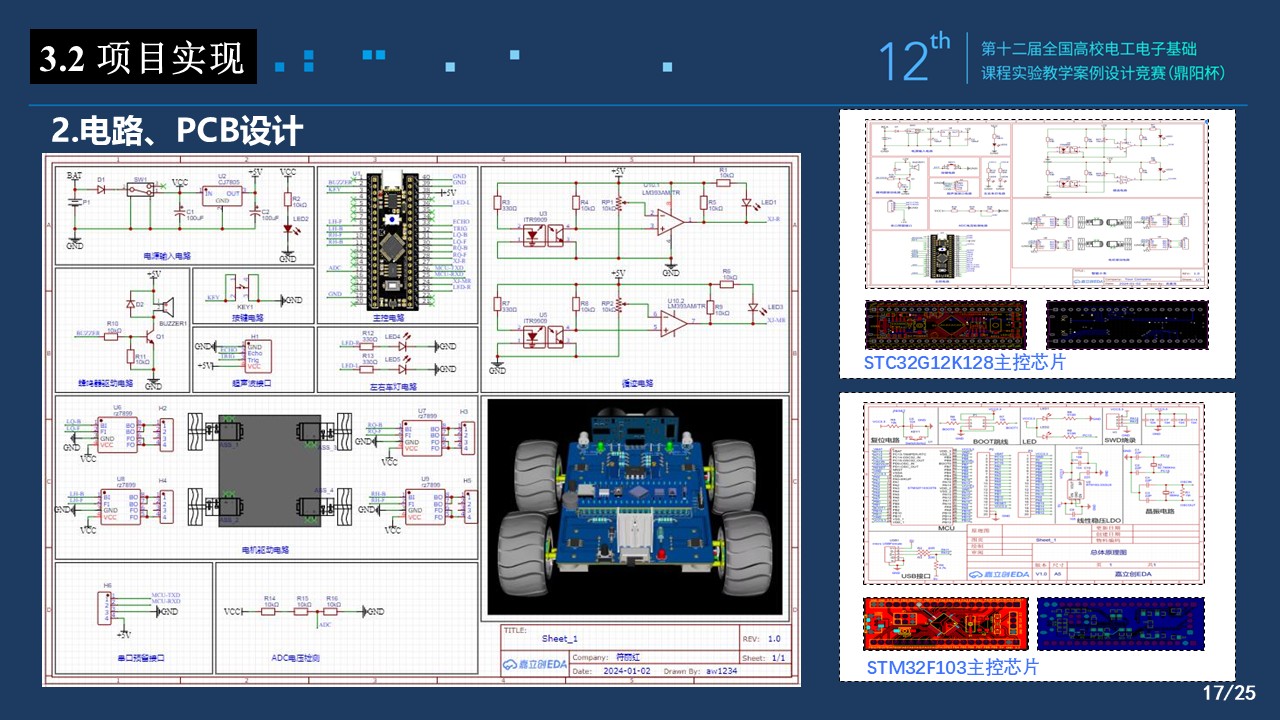
本实验鼓励学生自主设计芯片,使用立创EDA进行原理图设计。主控处理器原理图,如图10所示。PCB顶层设计,如图11所示。PCB底层设计,如图12所示。
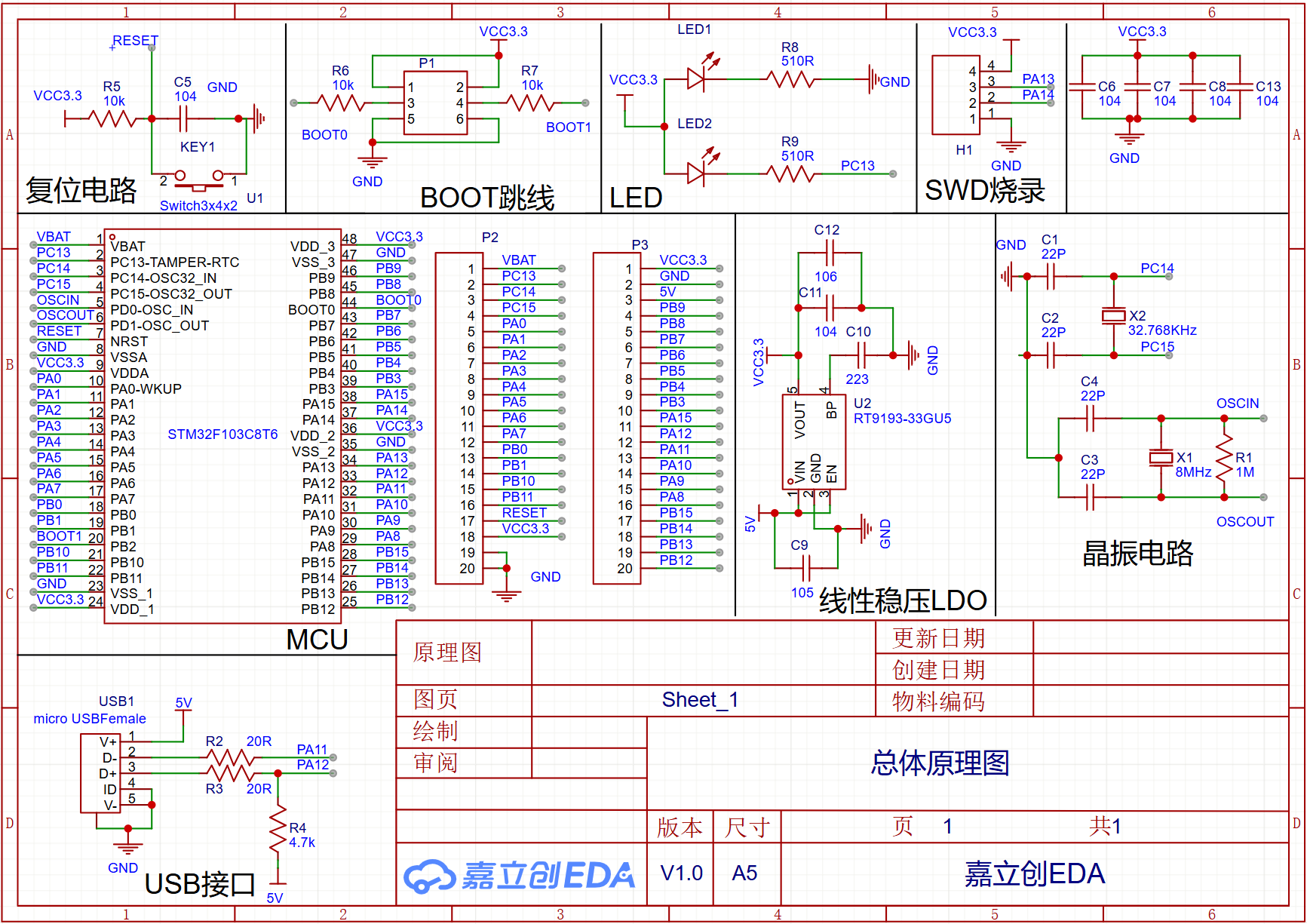
图 10总体电路原理图
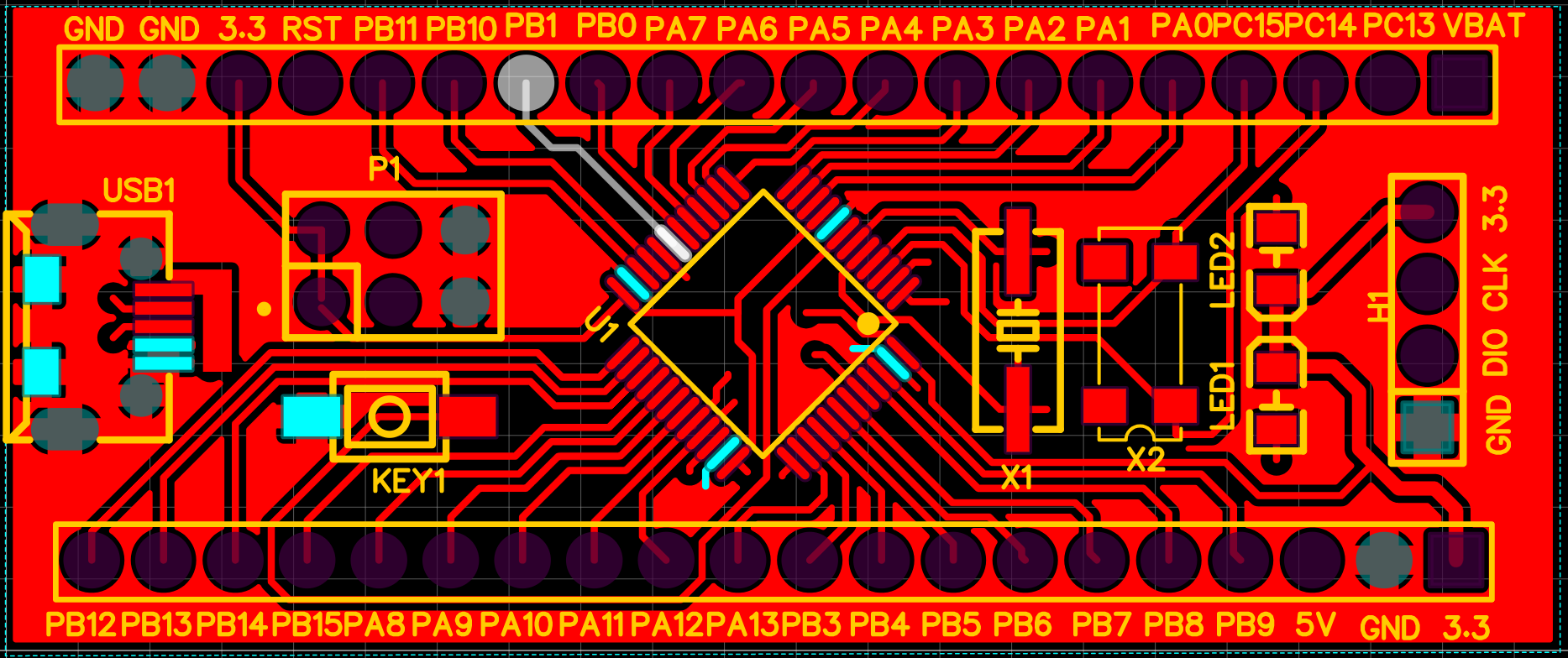
图 11 主控处理器PCB顶层设计图
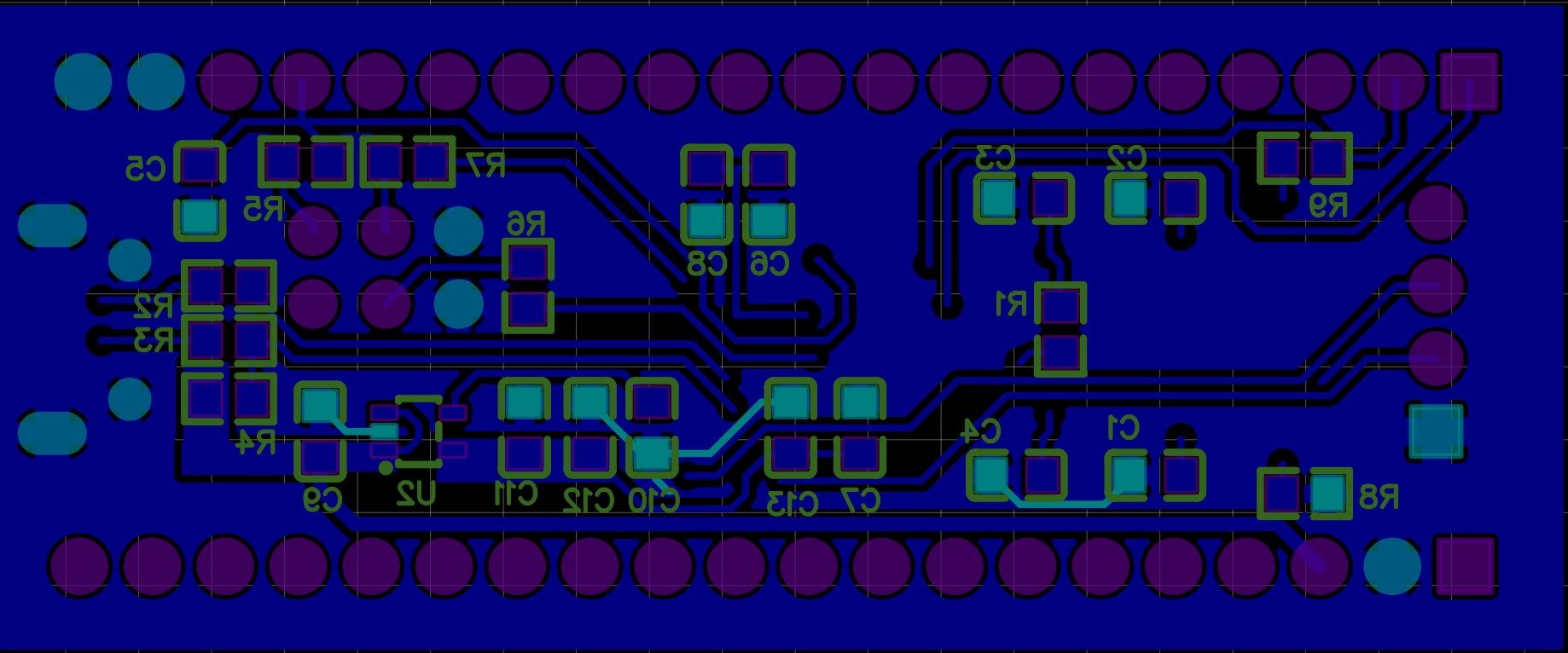
图 12 主控处理器PCB底层设计图
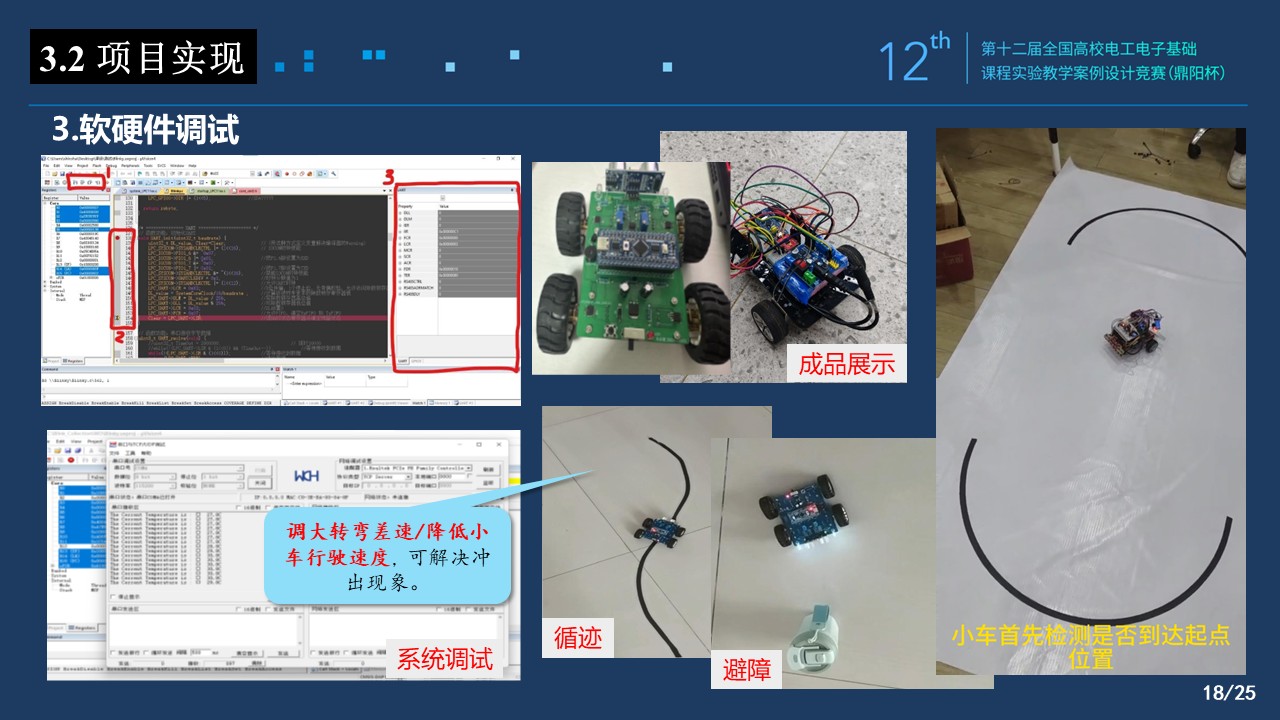
- 作品展示
学生通过自主设计车体外形和核心控制芯片,成功打造出多款具有特色的智能循迹小车。各式作品充分展现了学生在硬件选型、软件开发、系统优化等方面的创新能力和实践成果,作品展示如图13所示。
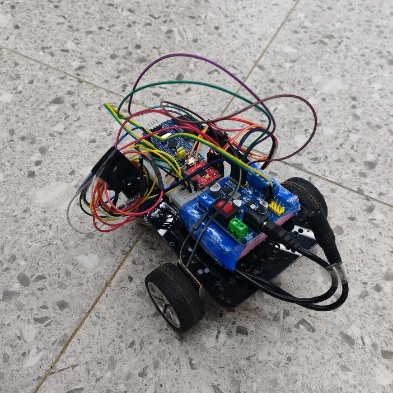
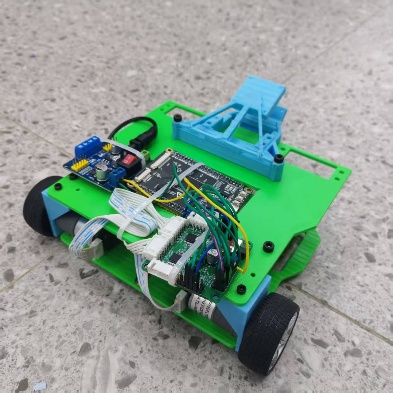
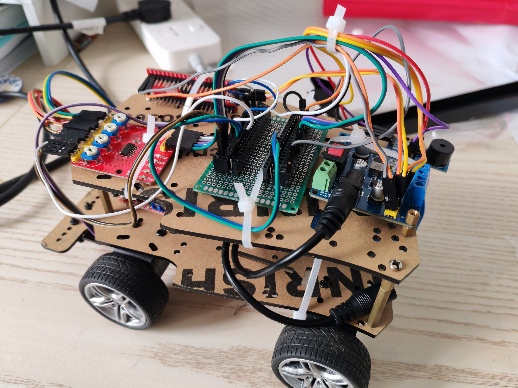
图13 作品展示
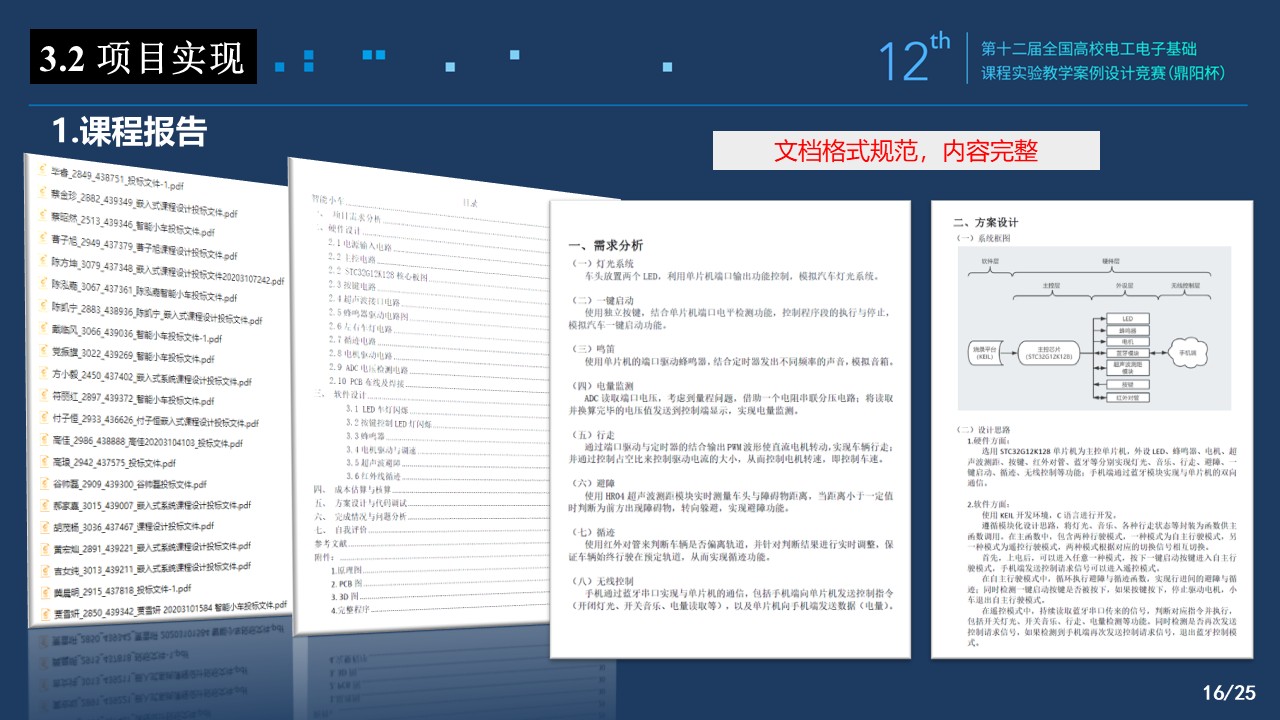
实验报告要求
实验报告需要反映以下工作:
(1) 功能需求分析与性能指标确定:结合实际工程背景详细分析课程设计题目的功能需求,明确系统的核心功能与性能指标,参考相关行业标准或已有技术,提供合理的设计依据。
(2) 初步方案设计:基于需求分析,设计出合理的系统架构,并初步规划各个功能模块。详细说明智能循迹小车的基本组成,包括传感器、电机驱动、电源管理、主控单元等,说明各部分单元电路和软件的设计思路,并绘制系统框图,确保设计方案的逻辑性与可行性。
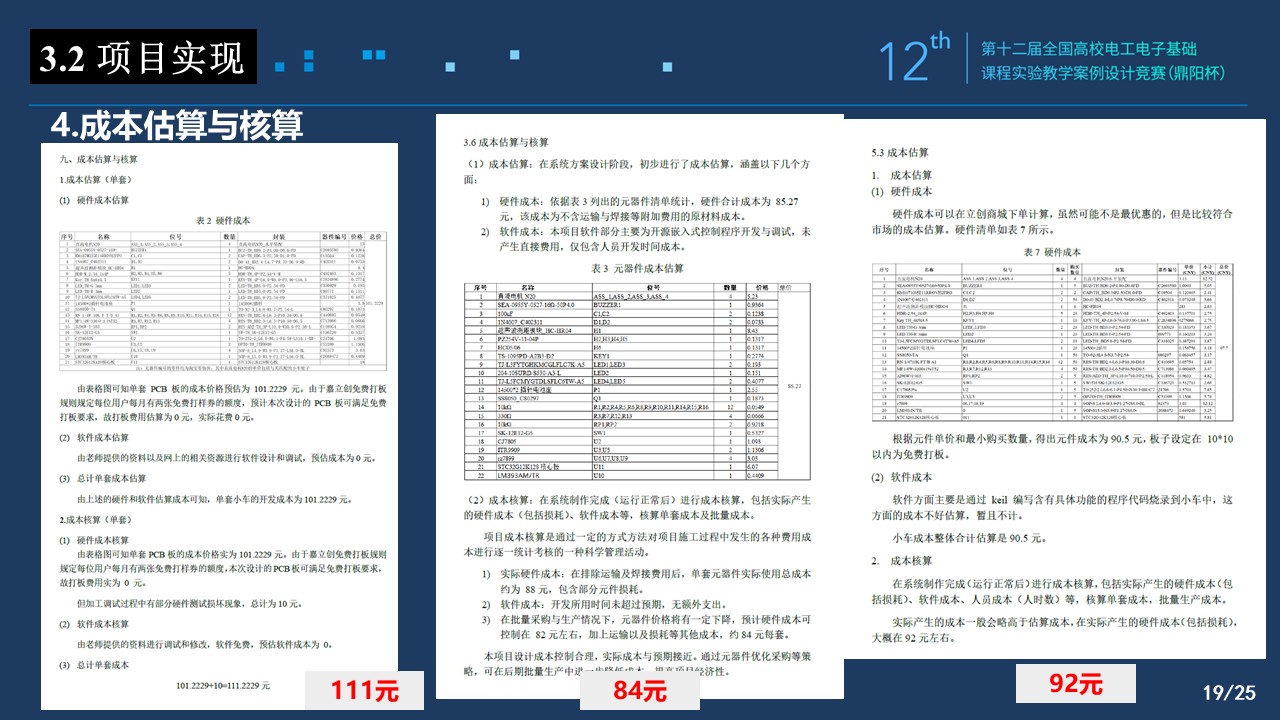
(3) 成本估算:根据设计方案,进行详细的成本估算,包括PCB加工、元器件采购、焊接、耗材、运输等费用,对成本分配进行分析,提出优化成本的方案,确保项目在预算范围内实施。
(4) 原理图与PCB图设计:根据制定的项目方案、功能与性能指标,利用立创EDA进行电路原理图与PCB图设计。用文字与图示说明设计思路,确保设计过程的清晰与规范。
(5) 程序设计思路与流程图:根据需求分析与方案设计,详细描述程序设计思路,绘制总体流程图与各个模块的流程图。附上关键代码,说明代码实现的功能与逻辑。
(6) 系统硬件与软件调试:详细记录系统硬件与软件的调试过程,说明使用的调试工具与方法。附上相关图片,直观展示调试过程与结果。
(7) 系统测试与结果分析:设计测试用例,搭建测试环境,对系统进行全面测试。将测试结果与设计功能和性能指标进行对比,分析出现问题的原因,并提出改进建议。
(8) 项目成本核算:对设计完成的系统进行项目成本核算,列出系统开发过程中所有实际支出,包括硬件、软件、调试费用等,分析实际成本与预算的差异,并分析原因。提出可能的成本降低方案,如替换部分元器件、优化制造工艺等。评估成本控制效果。
(9) 实验报告撰写:按照实验报告模板,规范撰写实验报告,确保内容完整、逻辑清晰、格式规范。报告应包括封面、目录、正文、参考文献等部分,正文部分需层次分明、重点突出。
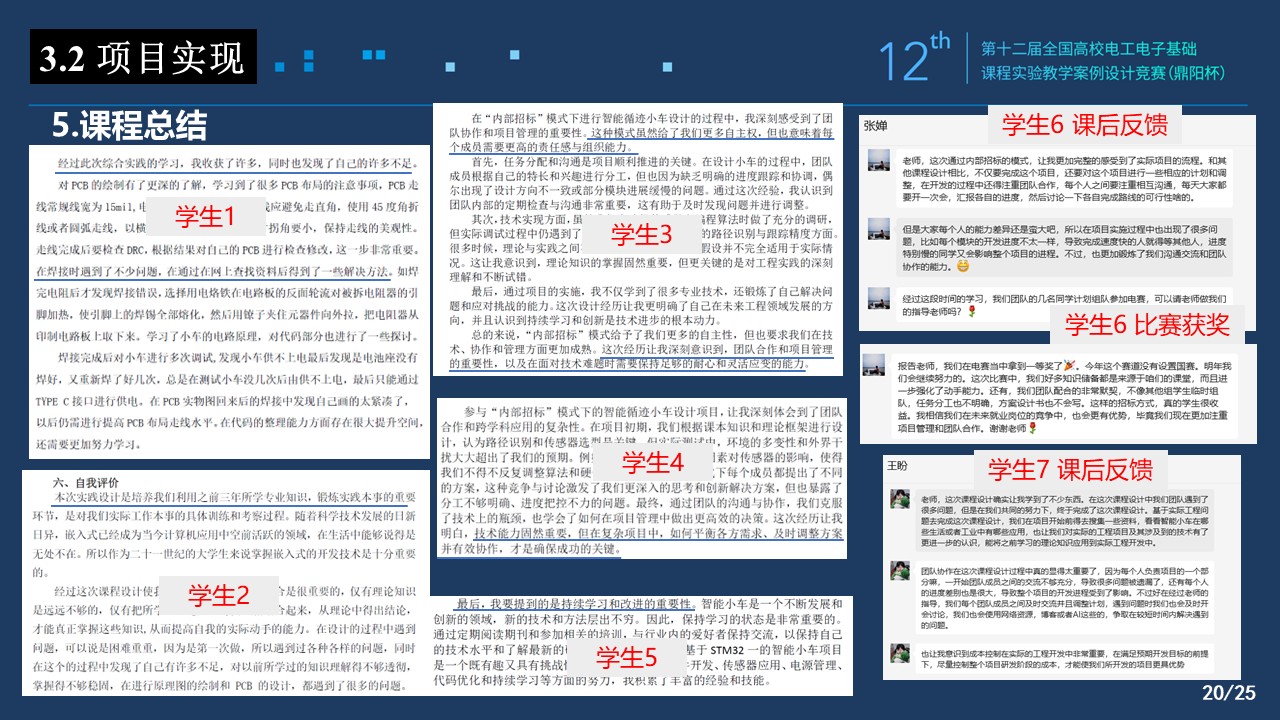
(10) 总结与反思:总结设计过程中的收获与不足,反思遇到的问题及解决方法。提出对未来设计工作的改进建议,体现对设计过程的深入思考。联系实际应用,思考如何将本实验的成果应用于更复杂的工程项目中。
考核要求与方法(限300字)
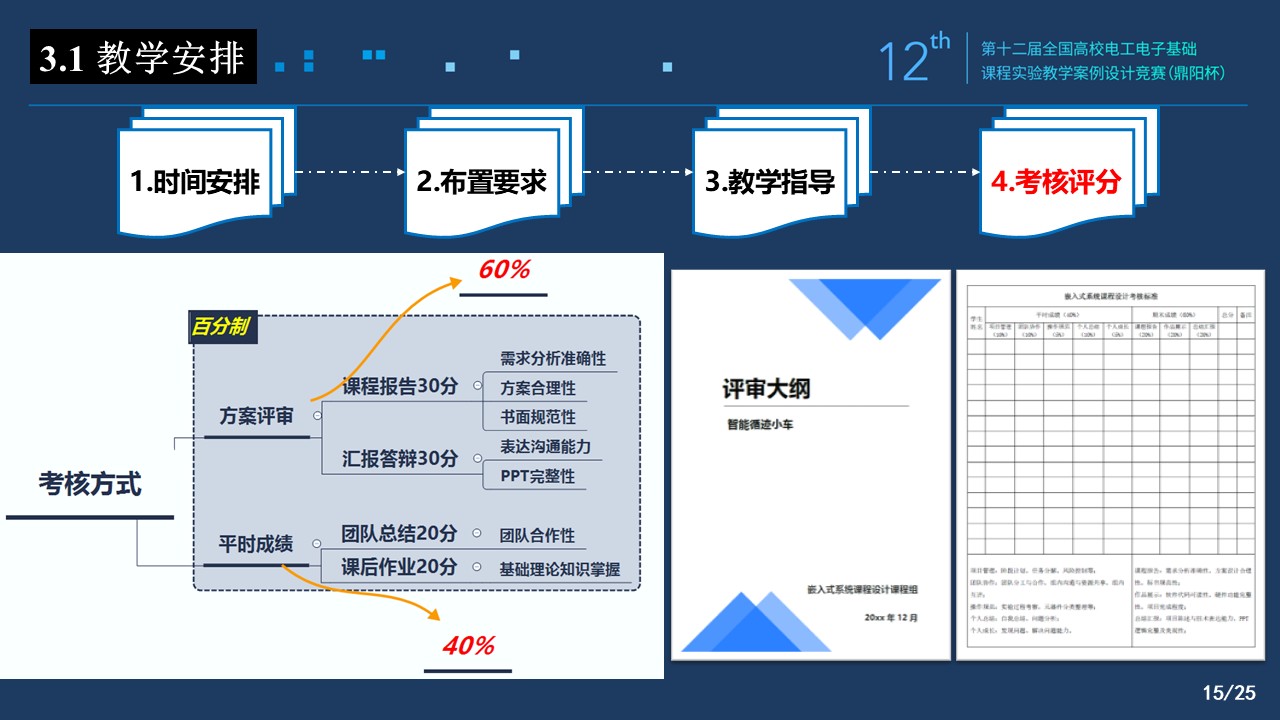
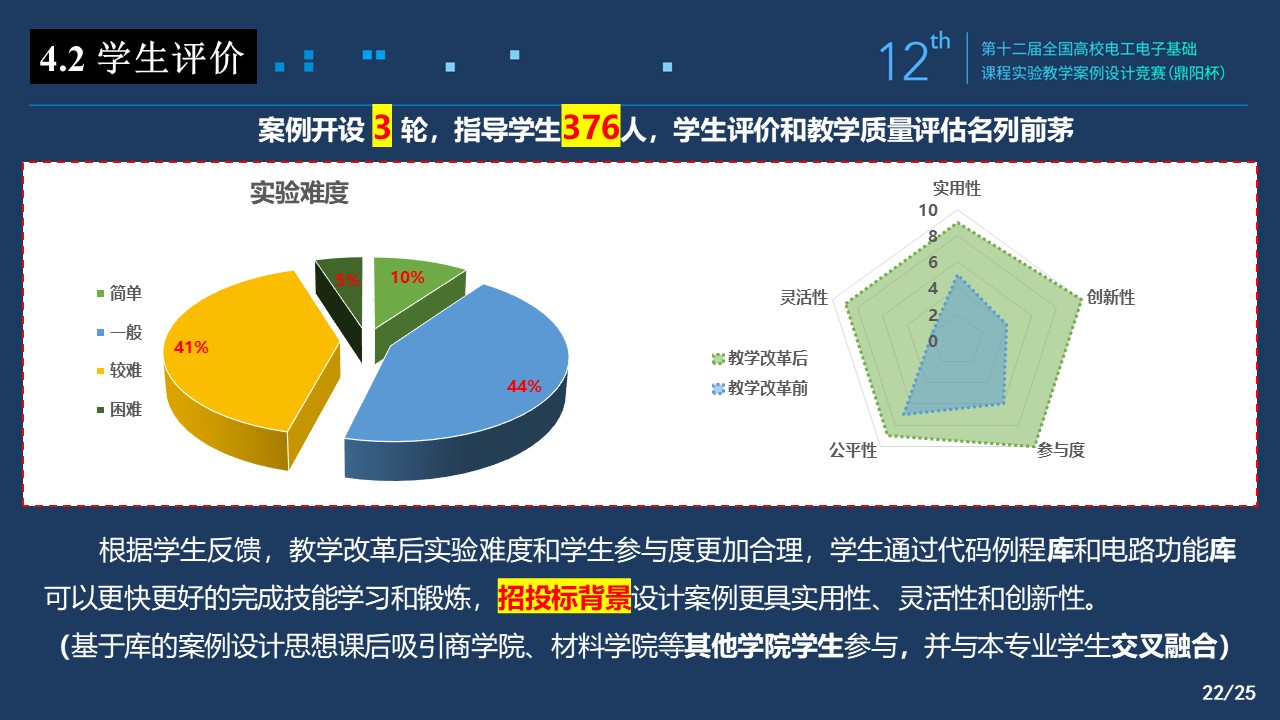
本课程最终通过多维度考核方式。总成绩由平时成绩(团队总结、操作规范、个人反思)和实验成绩(课程报告、作品演示、汇报答辩)组成,平时成绩占40%,实验成绩占60%。
- 平时成绩(40%)
-
团队总结:团队合作性(10%)
-
操作规范:项目管理完善性(20%)
-
个人反思:课程总结和拓展研究(10%)
- 实验成绩(60%)
-
课程报告:需求分析准确性、方案设计合理性、书面规范性(20%)
-
作品演示:软件代码可读性、硬件功能完整性(20%)
-
汇报答辩:个人表达沟通能力、PPT逻辑完整及美观性(20%)
项目特色或创新(可空缺,限150字)
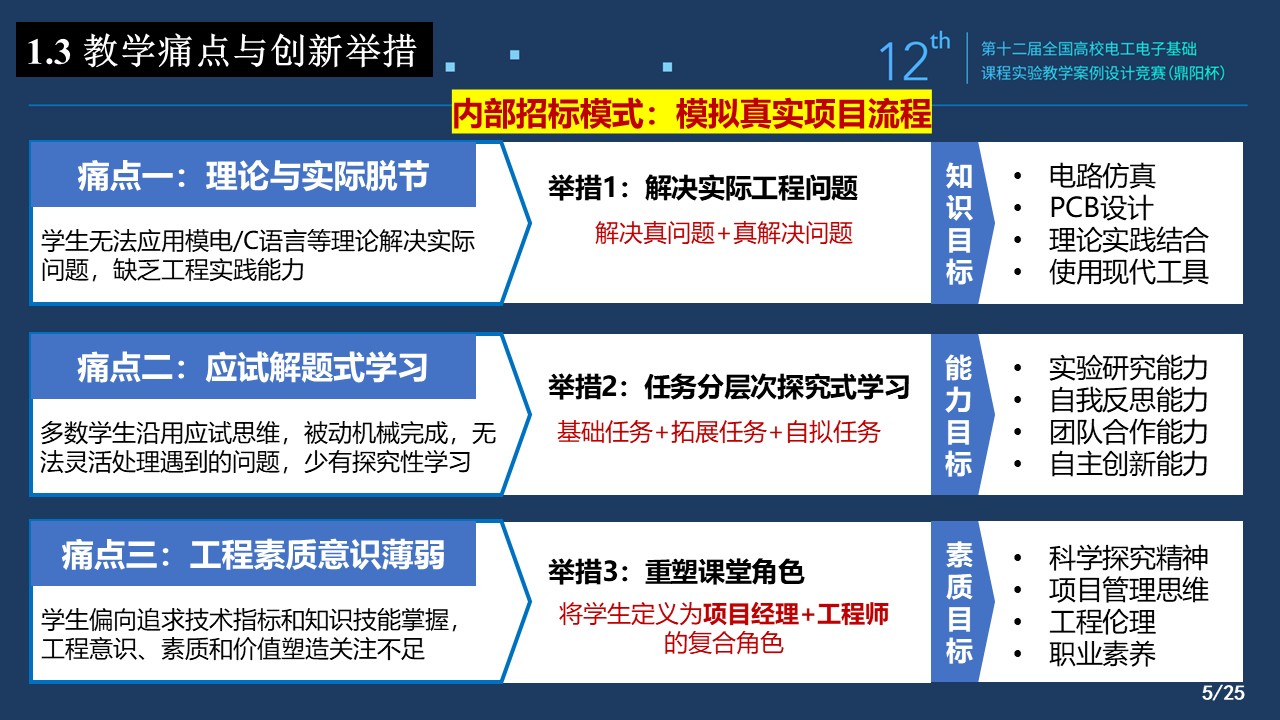
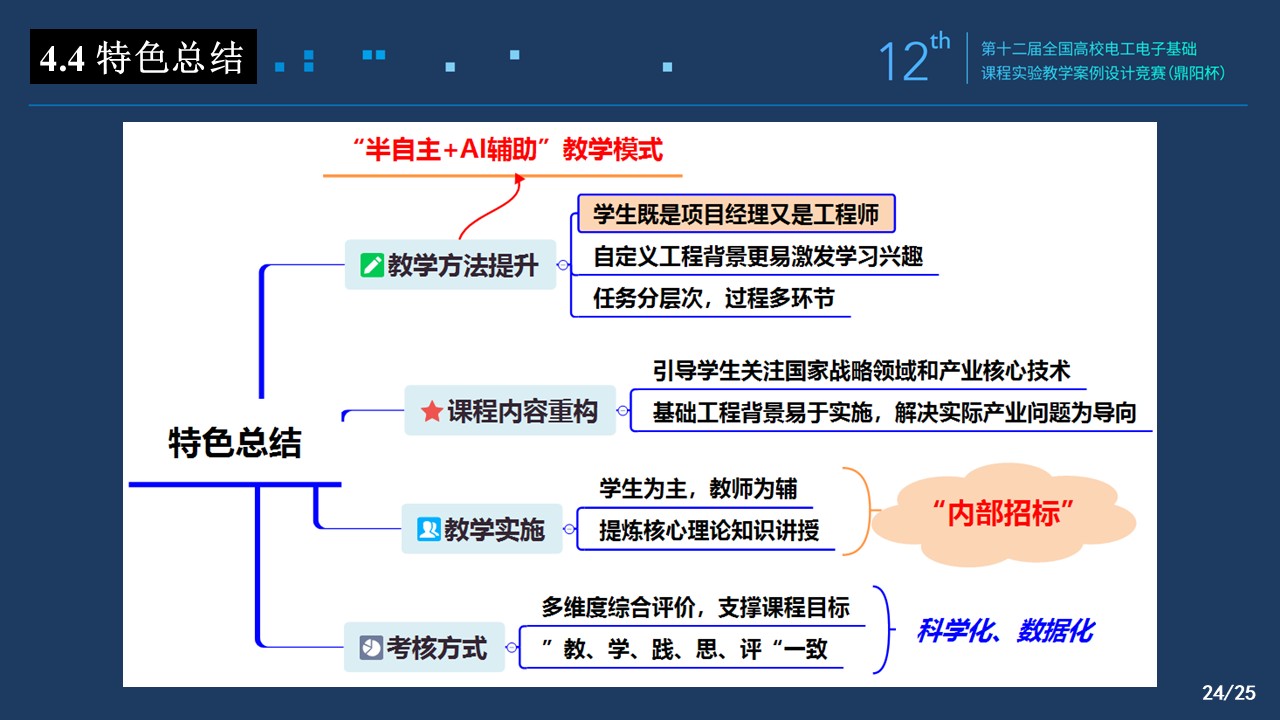
1) **基于“内部招标”式教学模式:**将实际工程问题转化为教学案例包,通过模拟真实工程招投标流程,将学生定义为项目经理加工程师的复合角色,强化学生的工程素质意识,将知识掌握、能力培养和职业素养贯穿整个项目周期。
2)**以半自主+AI辅助式案例设计思想进行课程内容重构:**鼓励学生自主设定工程背景,结合AI辅助进行探究式学习,以学生自主解决工程问题为导向激发学习兴趣,培养其问题分析与解决能力,同时设计多维度综合评价体系支撑课程目标。