微机械谐振式传感器控制电路设计实验

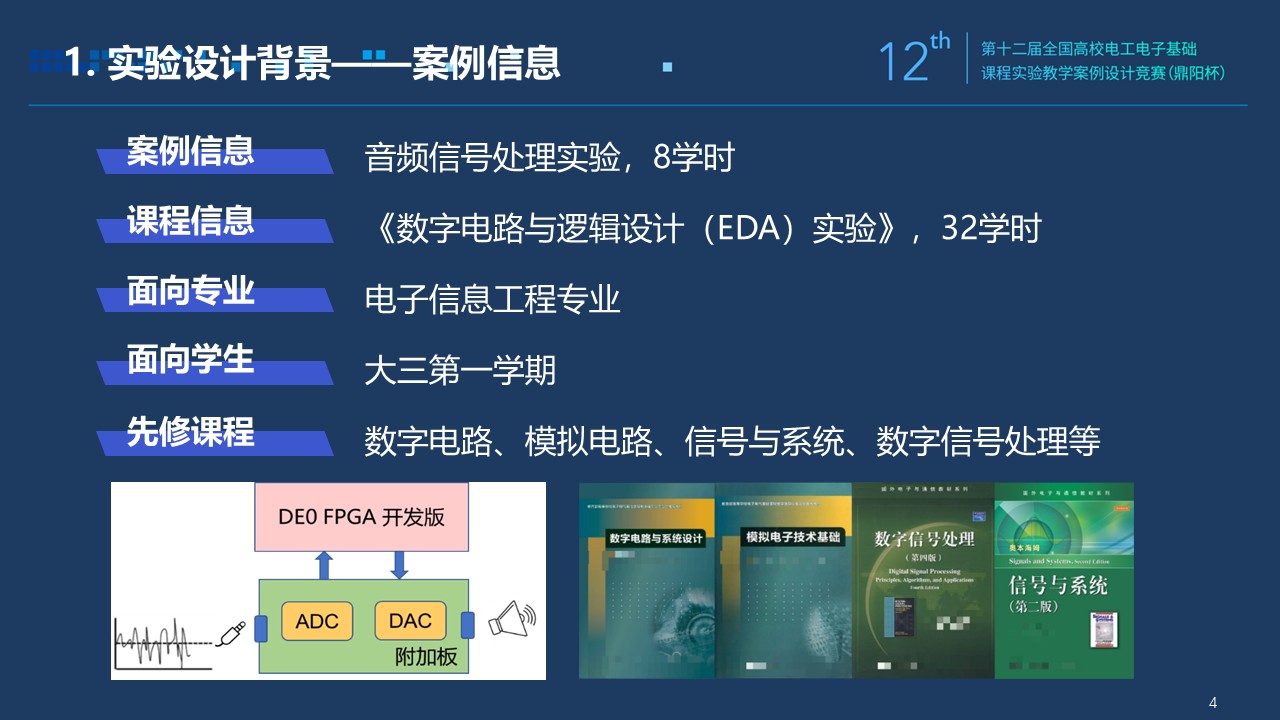



实验题目:微机械谐振式传感器控制电路设计实验
课程简要信息
课程名称:电子线路综合设计实践
课程学时: 32
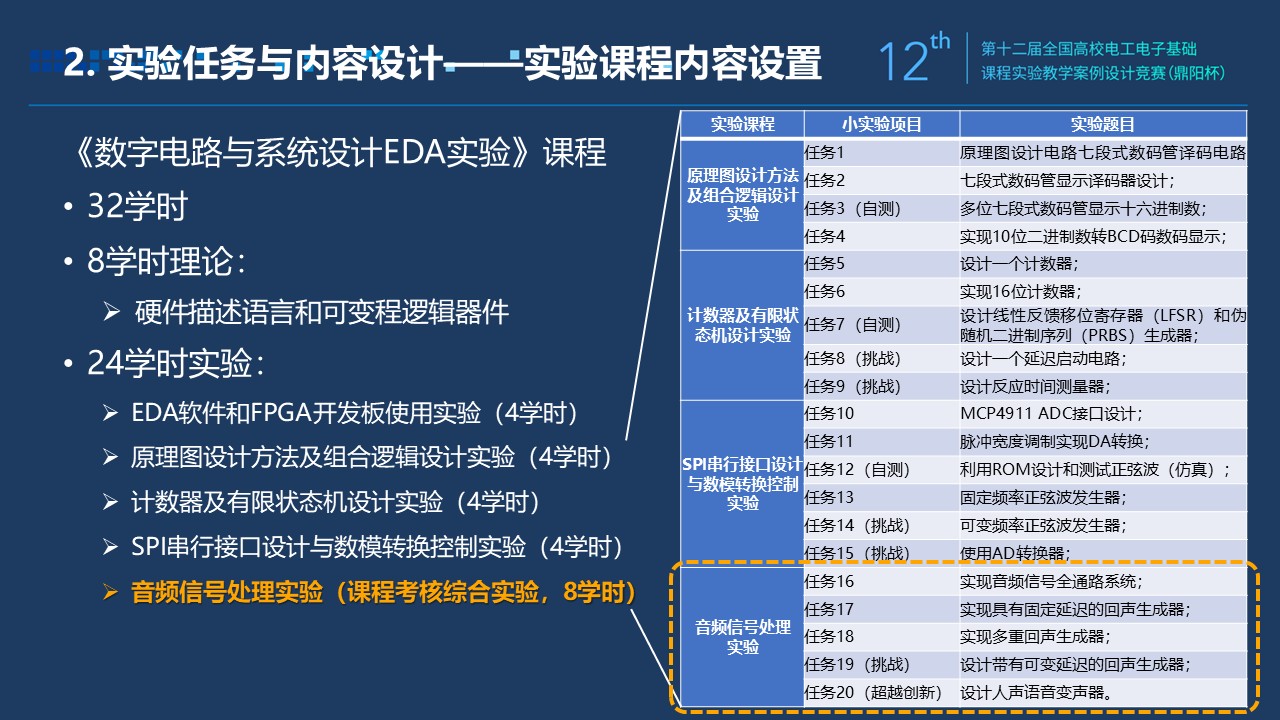
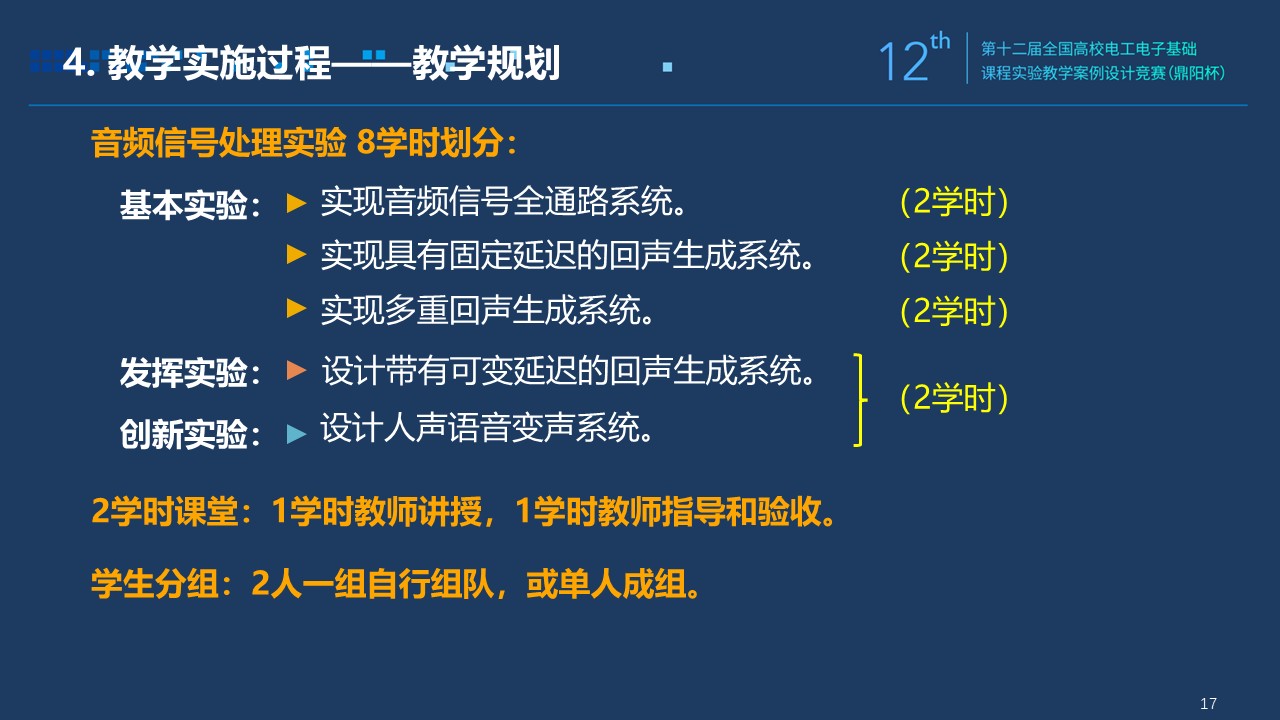
项目学时:24学时(16学时课内,8学时课外)
适用专业:电子信息工程、通信工程、电子科学与技术、微电子科学与技术等
学生年级:二年级(第四学期)
实验内容与任务(限500字,可与“实验过程及要求”合并)
项目需要完成的任务(如需要观察的现象,分析某种现象的成因、需要解决的问题等);是否设计有不同层次的任务。
-
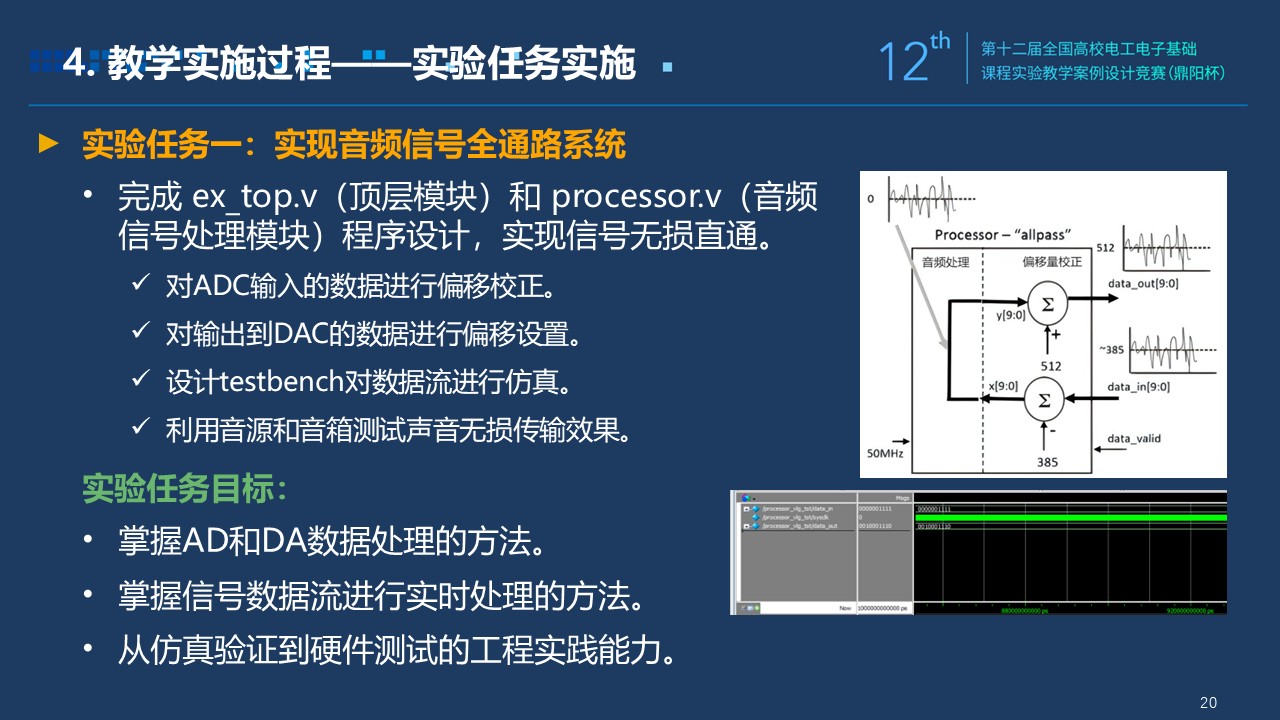
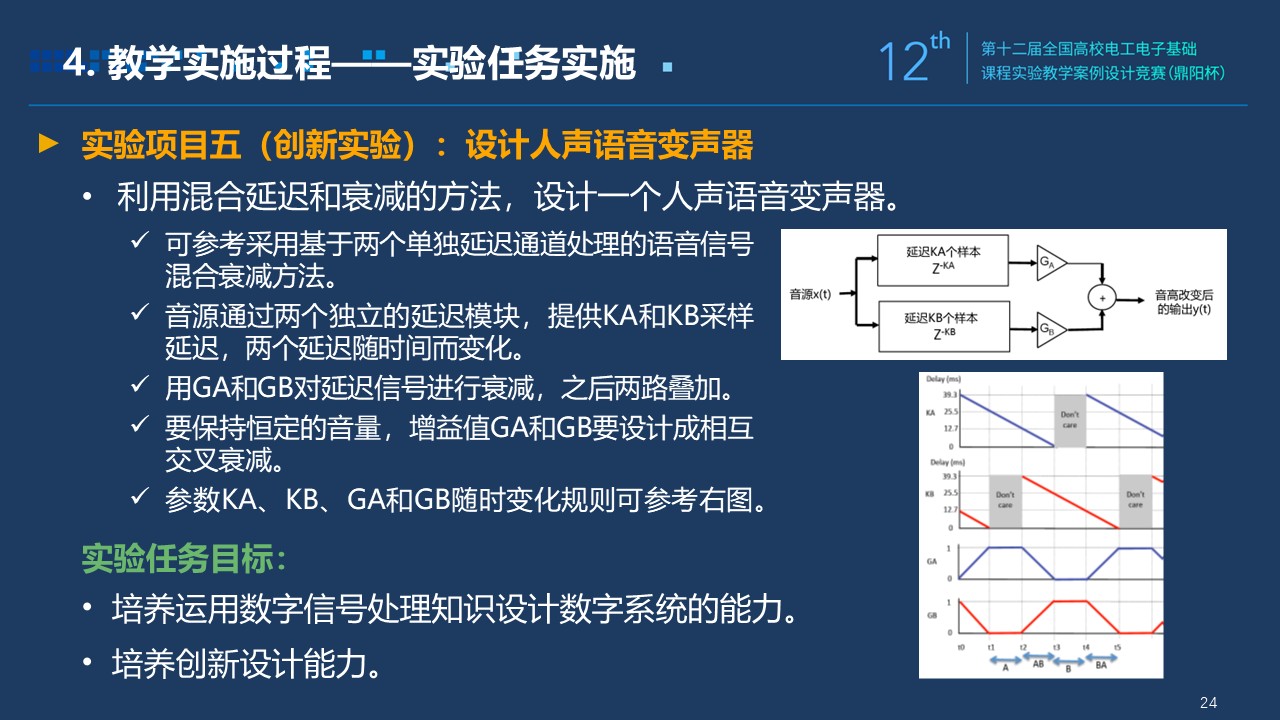
针对教师课题组研制的真空封装的微机械谐振式加速度计(谐振频率35kHz,品质因数约为1500-2000)和陀螺仪(谐振频率约为13kHz,品质因数约为1500-2000),选择一个传感器,设计接口电路测量传感器的谐振频率和品质因数;
-
根据测量的微机械谐振传感器的谐振频率和品质因数,设计自动增益控制电路和频率跟踪电路,实现振动传感器微结构振动幅度恒定和频率稳定跟踪;
-
结合实验现象,分析影响传感器的微结构振动幅度的电学参数,分析相位差对微结构起振的影响。
实验过程及要求(限300字)
如对学生在实验过程中在需求分析、资料查询、自学预习、思考讨论、方法设计、进程规划、软件仿真、平台构建、器件选择、表格设计、现象观察、数据测试、问题分析、总结报告、验收答辩、演讲交流等各方面的要求。
-
查阅学习相关的资料,了解微机械谐振式加速度计、双框架振动陀螺仪的工作原理、制造及封装工艺、测控电路的目的;
-
根据静电驱动微机械谐振传感器(加速度计或陀螺仪)的工作原理,设计接口电路读取振动信号,解决微弱信号检测中存在的同频干扰问题;
-
结合设计的接口电路和扫频仪器,设计谐振频率和品质因数测量方案并进行测试和记录;
-
根据测控电路要求实现恒定振动幅度和谐振频率的稳定跟踪,设计自动增益控制电路和频率跟踪电路方案;
-
利用MATLAB软件对自动增益控制电路与频率跟踪电路方案进行数值建模仿真,确定电学参数对稳态振动幅度和起振时间的影响,相位参数对频率跟踪精度的影响;
-
根据数值建模仿真,设计并装配微机械谐振传感器(加速度计或陀螺仪)的测控电路,调试并记录,关注电学参数对传感器的性能影响;
-
撰写设计总结报告,并通过分组演讲,学习交流不同解决方案的特点。
相关知识及背景(限150字)
项目涉及所需的知识方法、实践技能、应用背景、工程案例。
微机械惯性传感器主要有加速度计、陀螺仪,具有体积小、功耗小、可批量生产优势,广泛应用于惯性导航单元、消费电子(手机、汽车安全气囊)、地震监测等军民用领域。
微机械谐振式加速度计和双框架振动陀螺仪,静电驱动,能够与测控电路集成在一起,输出为数字频率信号,抗干扰性强,申报人课题组研制的微机械谐振式加速度计和陀螺仪已经应用于国防某部队试验使用,相关介绍见图1。
图1 加速度计和陀螺仪的工程应用背景
图2 加速度计和陀螺仪的版图结构、流片封装
微机械谐振式加速度计和陀螺仪在真空封装后,核心是一个微机械谐振器,等效于一个品质因数大的带通滤波器,等效模型见图2,需要设计驱动电路实现微机械振动梁的谐振,同时,为了减少振动幅度对谐振频率的耦合影响,需要驱动电路实现振动幅度恒定。另外,由于微机械属于微米尺度,输出信号微弱,需要在静电驱动下,读取微弱的电容信号。
这是一个运用电路、模拟电子技术、数字电子技术解决工程实际问题的典型案例,需要运用到的理论知识包括:高频方波产生、波形调制、模拟乘法器或开关的波形解调、滤波器(高通、低通、带通滤波器)、检波电路、自动增益控制电路、移相电路、锁相环电路等。
需要学生拔高,能够结合控制理论相关知识对线性系统进行建模和分析系统的行为特征,会应用到平均周期法、空间状态法等理论知识。线性系统的建模除开微机械谐振器外,还有电路模块的等效建模。
涉及到电路原理图设计、PCB设计及装配、电路的调试。需要利用实验室仪器,搭建谐振频率和品质因数测量方案。
需要学生掌握MATLAB软件下的Simulink模块的使用,包括数值建模和仿真,获得时域的控制效果曲线。

实验环境条件
项目实施需要实验资源,包括实验装置功能、实验仪器设备、设计软件工具、主要电子元器件等。
(1)实验传感器
本实验属于科教融合实验,需要微机械谐振式加速度计和双框架振动陀螺仪,教学团队已经批量供货给一些军民用单位,传感器数量和质量具有较好的保障。
(2)实验仪器设备
本实验需要用到直流稳压电源、数字信号发生器、数字存储示波器、数字扫频仪、数字频率计(可以用信号发生器测)、恒温焊台、电工工具。
(3)设计软件工具
本实验需要用到Multisim软件(版本11.0以上)完成部分电路仿真;需要利用Matlab软件(版本6.5以上)进行数值建模仿真,验证控制电路的电参数对控制性能影响;需要使用Altium Designer软件完成电路原理图和PCB设计。
(4)主要元器件
NE555芯片、LTC1799、OP37、AD823、MAX4544、AD633、CD4046、电容和电阻(贴片和直插)等。
教学目标与目的(限150字)
在具有较强科研探索和工程应用背景项目实施过程中,引导学生了解微机械电子系统的交叉学科知识,利用掌握的电子技术综合理论知识,结合工具软件:Matlab、Multisim、Altium Designer辅助解决微弱信号检测和闭环自激和锁相环电路设计及测试的工程问题,引导学生根据任务合理选择电路方案及参数,熟练掌握电学仪表构建电学参数测试方案,并通过测试与分析对项目作出技术评价。
教学设计与实施进程
《电子线路综合设计实践》是获评为2024年江苏省一流实验课程,本课程是学校电子信息工程、通信工程、电子科学与技术、微电子科学与工程等专业的专业基础必修课程, 这门课程的建设理念是“能力培养为主,闭环实施,监控过程并分析,案例项目动态调整”,课程包含了10个项目,每个项目8-24学时,学生组队选择2个项目开展,课程的实施经过11个环节,其中从项目发布后的5个环节需要学生参与,最终形成达成度报告,见图3。
图3 课程实施流程
课前:
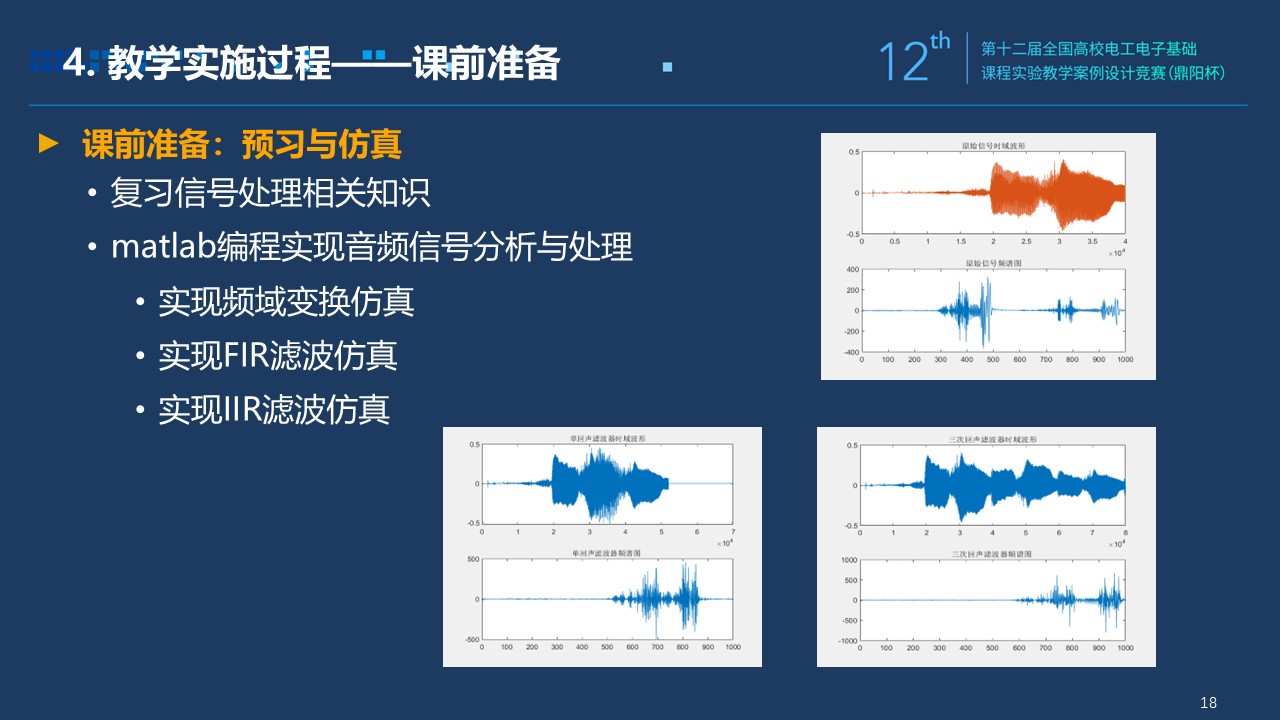
本项目通过班级QQ群和学习通发布,要求学生2人/组,确定好分组,学生在下载任务书后,针对任务书及附带的问题开展查阅资料和学习,安装好必须的软件。要求明确项目完成的任务及能够熟练使用相关软件和相关仪器仪表。
课中:
教师通过课堂讲解任务的要求及典型的电路方案及原理,演示历年作品,引导学生掌握相关的基础理论知识和形成初步的技术方案,开展学习引导:
-
学习微机械谐振式加速度计、陀螺仪的工作原理,微机械振动结构等效于一个品质因数很大的带通滤波器,但接口电容信号特别微弱,同时存在同频干扰问题,需要形成调制解调的方案克服微弱信号检测和同频干扰问题,获得滤波器的中心频率和品质因数;利用现有的仪器仪表,构建相关的测试方案。
-
微机械谐振式加速度计、陀螺仪的控制电路要求实现恒定幅度的振动和稳定的谐振频率跟踪,自动增益控制方案的实现包括哪些方案?直流自动增益和交流自动增益的区别有哪些?结合模拟电子技术,自激振荡电路需要满足相位和幅度关系,相位如何实现调整满足要求。
-
基于Matlab/Simulink的控制电路的动力学建模及数值仿真,分析并记录参考电压及相位差对控制电路性能的影响,尤其要分析PI控制器对恒定幅度控制的影响。
-
项目的后续可扩展性,优化结构设计、开展频率的高精度测量及稳定性分析等工作。
-
在电路设计、搭试、调试完成后,必须要用标准仪器设备进行实际测量;需要根据实验室所能够提供的条件,设计测试方法,搭建幅度和频率稳定性测量方案。
-
在实验完成后,组织学生以项目演讲、答辩、评讲的形式进行交流,了解不同解决方案及其特点,拓宽知识面。
在设计中,要注意学生设计的规范性;如系统结构与模块构成,模块间的接口方式与参数要求;在调试中,要注意工作电源、参考电源品质对系统指标的影响,电路工作的稳定性与可靠性;在测试分析中,要分析系统的误差来源并加以验证。
课后:
线上线下的答疑,针对不同层次学生,组织学生开展创新性设计探索活动。
实验原理及方案
实验的基本原理、设计依据、完成任务的思路方法,可能采用的方法、技术、电路、器件。
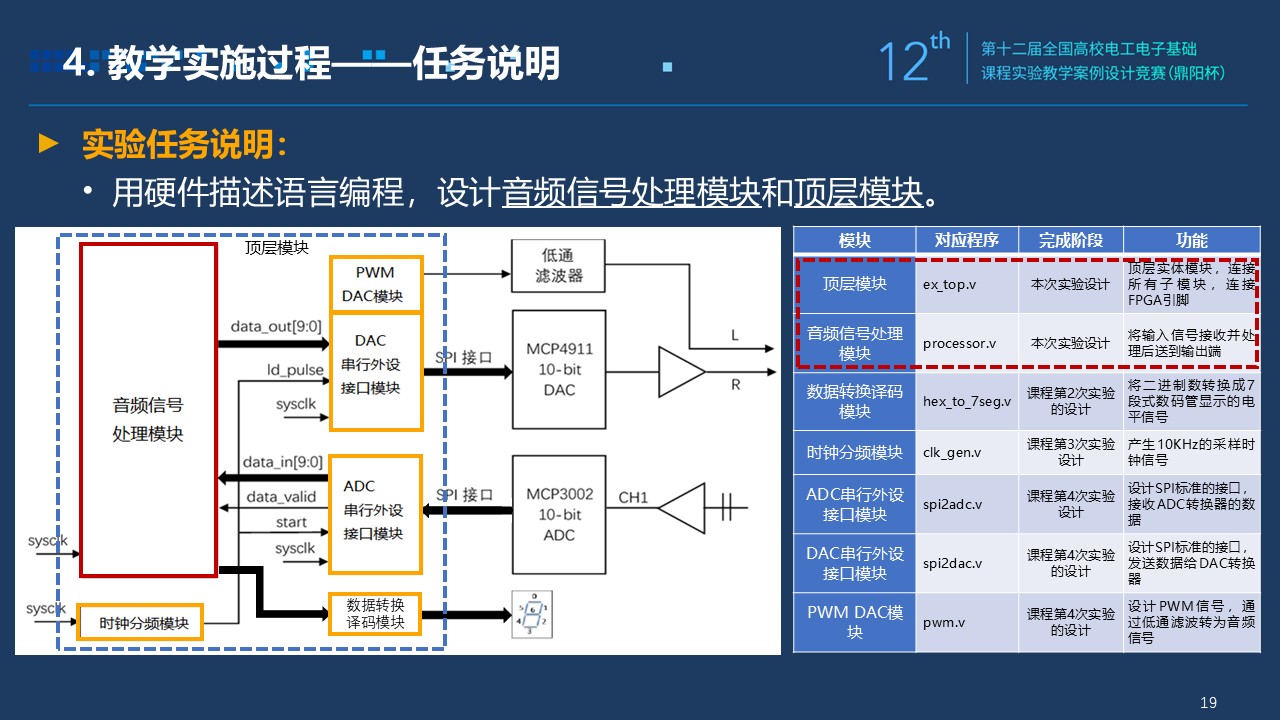
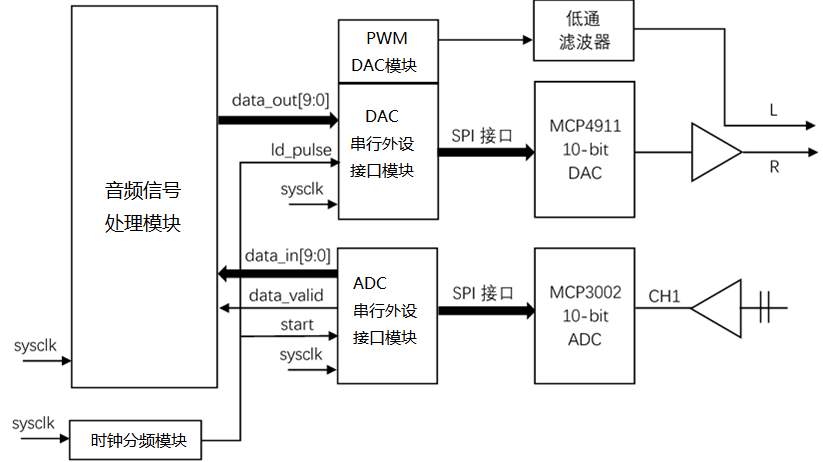
- 系统结构(给出其中一种方案)
图4 整体方案
- 实现方案
(1)谐振频率和品质因数测量电路(开环扫频和方波调制和模拟乘法器或开关解调)
微机械谐振式加速度计和陀螺仪均采用静电驱动,通过电容接口换能,通过电容的变化来表征振动结构的机械特性,如谐振频率和品质因数。静电驱动一般都采用直流电压叠加交流电压来驱动微机械振动梁。在表芯的接口电路中,存在等效的电学模型如图5所示,驱动电极与振动梁电极存在驱动电容,检测电极与振动梁电极存在检测电容,这两个电容的变化频率与交流电压的频率一致。同时存在驱动电极到检测电极的固定电容,此固定电容两端加载的是直流电压和交流电压,这样就导致了同频干扰的问题的存在。
图 5 表芯等效接口电气模型
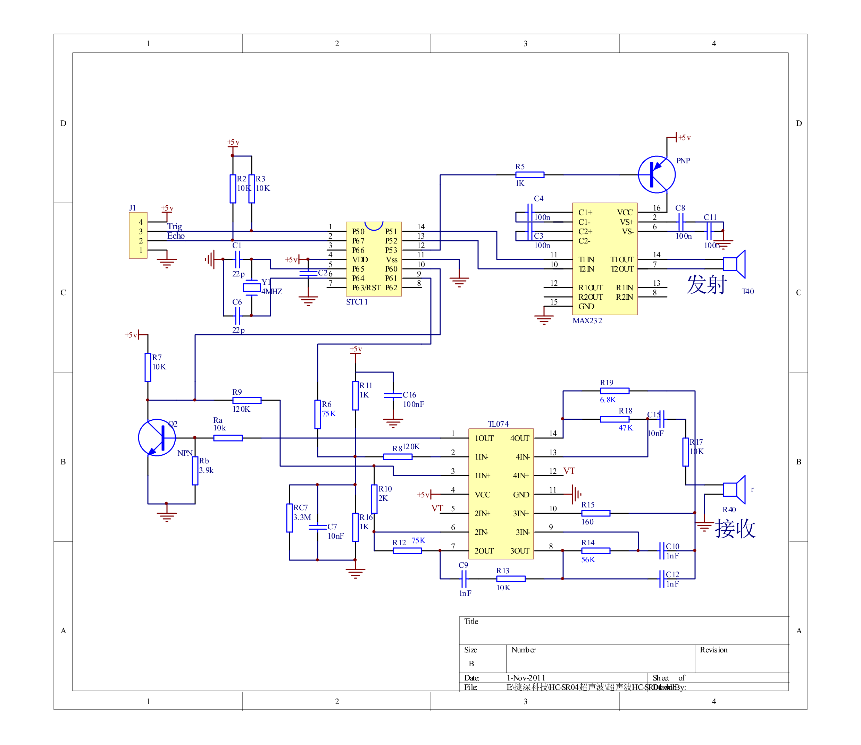
针对同频干扰问题的存在,可以采用高频方波或者正弦波调制,利用模拟开关或者模拟乘法器进行解调,结合高通滤波器和低通滤波器来滤除同频干扰。其中,采用动态信号分析仪或者扫频仪进行扫描,获得扫频曲线,从而得到谐振频率和品质因数,接口电路见图6所示,其中采用了方波调制和模拟开关解调,其中动态信号测试仪Agilent35670A为测试得到的扫频曲线。
图 6 方波调制和模拟开关解调接口电路下的扫频测试
(2)自激恒定幅度驱动控制(自激振荡、自动增益、移相电路)
由于微机械谐振式加速度计和陀螺仪均采用了金属管壳的真空封装,品质因数较大,测控电路需要保证静电驱动力实现振动幅度恒定,减少幅度变化对频率的耦合影响;同时能够跟踪谐振频率实现微机械振动梁的谐振,电容信号幅度最大,信噪比大,便于微弱信号的检测。
对于恒定幅度的控制,主要有自动增益控制方案,有振动幅度与静电驱动力有关,而静电驱动力与直流及交流驱动电压相关,从而有交流电压的自动增益控制(AC-AGC)和直流电压的自动控制(DC-AGC)两种,电路实现方案有自动增益控制芯片和分立器件构建两种主要方案。
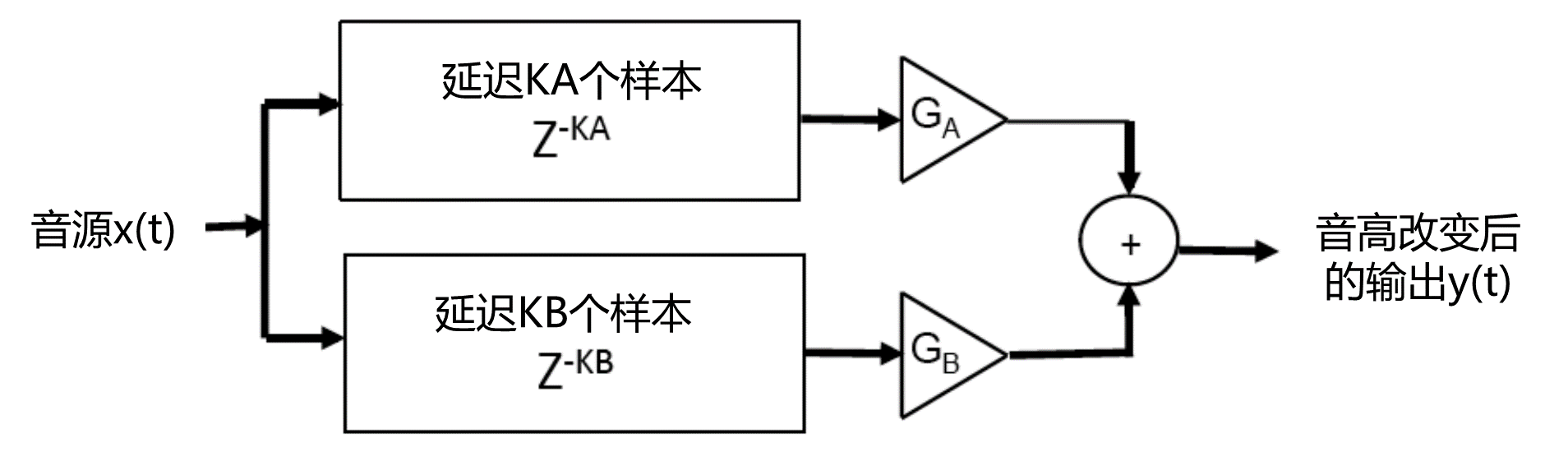
对于谐振频率的跟踪控制,主要有自激振荡和锁相环跟踪控制(模拟锁相环和数字锁相环)两种方案,图7为对应的闭环自激测控电路,通过高频方波的隔离直流后调制激励的正弦电压,利用模拟开关进行解调,然后得到正弦电压信号,在1位置处为检测信号,可以获得振动频率信息及振动幅度。该信号经过移相放大后一路直接作为交流驱动电压,另外一路经过检波获得电压幅度,然后利用反相电路和PI控制电路实现直流自动增益控制,得到的直流电压加载在驱动电极上形成直流电压的自动增益控制(DC-AGC)。
图 7 直流-自动增益控制下的自激振荡电路
通过对测控电路各部分电路的动力学原理进行建立模型,得到了图8所示的动力学分析模型,分析整个系统的稳定性及电学参数对测控电路的影响。
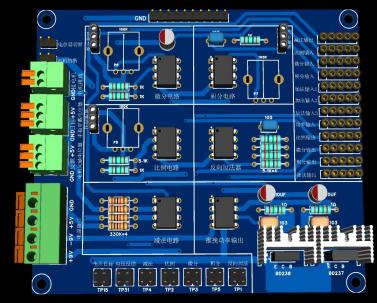
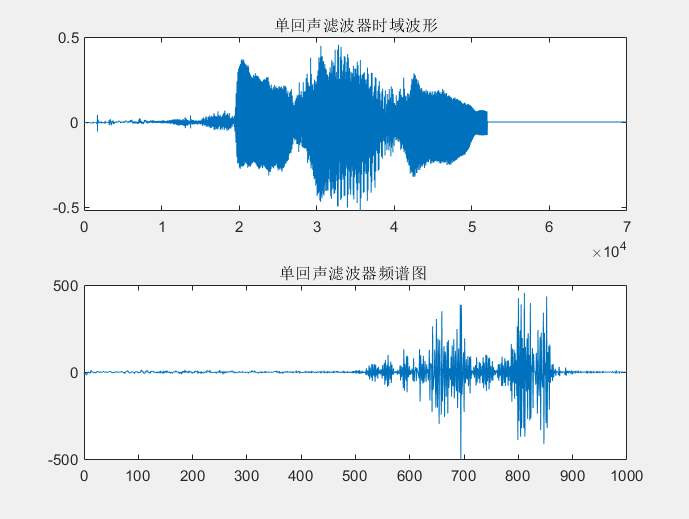
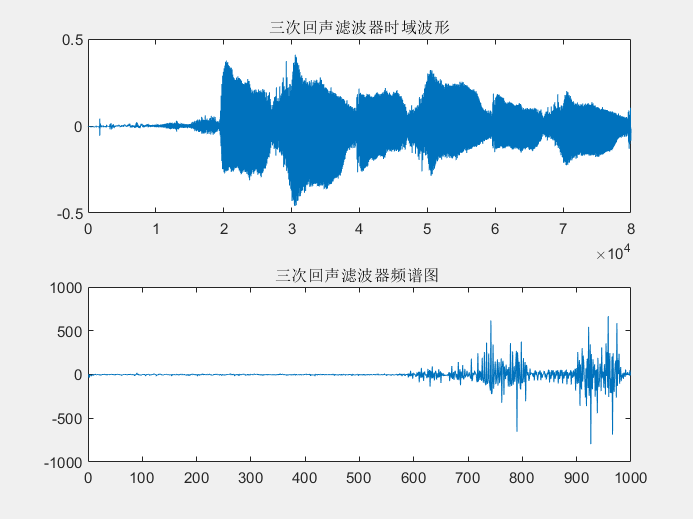
图 8 直流-自动增益控制下的自激振荡电路动力学分析模型
对图8,建立系统动力学状态方程为:
[]{#_Ref281046793 .anchor}(1)
利用平均周期法化简,得到:
[]{#_Ref281049026 .anchor}(2)
(3)
[]{#_Ref281049072 .anchor}(4)

[]{#_Ref281049084 .anchor}(5)
求取式(1)对应的平衡点,令各慢时变参数对时间求导为0,求解后得到平衡点为:

(6)
 有:
有:
[]{#_Ref281050757 .anchor}(7)
式(7)展开后表示为:
[]{#_Ref281051372 .anchor}(8)
[]{#_Ref281051373 .anchor}(9)
[]{#_Ref281051375 .anchor}(10)
[]{#_Ref281057977 .anchor}(11)
式(11)中,
为对应的特征值,根据劳思判据,系统稳定需要满足:
(12)
系统的动态性能与极点的位置有关,对应系统的极点分布可以通过不同的 、
、 及
及 来改变,这样系统就具有不同的动态性能。通过对平衡点的分析发现,振动幅度
来改变,这样系统就具有不同的动态性能。通过对平衡点的分析发现,振动幅度 的稳态值与品质因数和频率无关,这意味着在扰动作用下,幅度将保持原来的值,采用这样的控制方法能实现恒定幅度振动。根据微结构设计及测量的尺寸及品质因数,建立基于Matlab/Simulink的数值仿真模型,数值模型如图9所示,调节相关电学参数获取不能控制效果,包括振动幅度和频率跟踪等。
的稳态值与品质因数和频率无关,这意味着在扰动作用下,幅度将保持原来的值,采用这样的控制方法能实现恒定幅度振动。根据微结构设计及测量的尺寸及品质因数,建立基于Matlab/Simulink的数值仿真模型,数值模型如图9所示,调节相关电学参数获取不能控制效果,包括振动幅度和频率跟踪等。
图 9 基于Matlab/Simulink的直流自动增益控制和自激振荡数值仿真建模(加速度计)

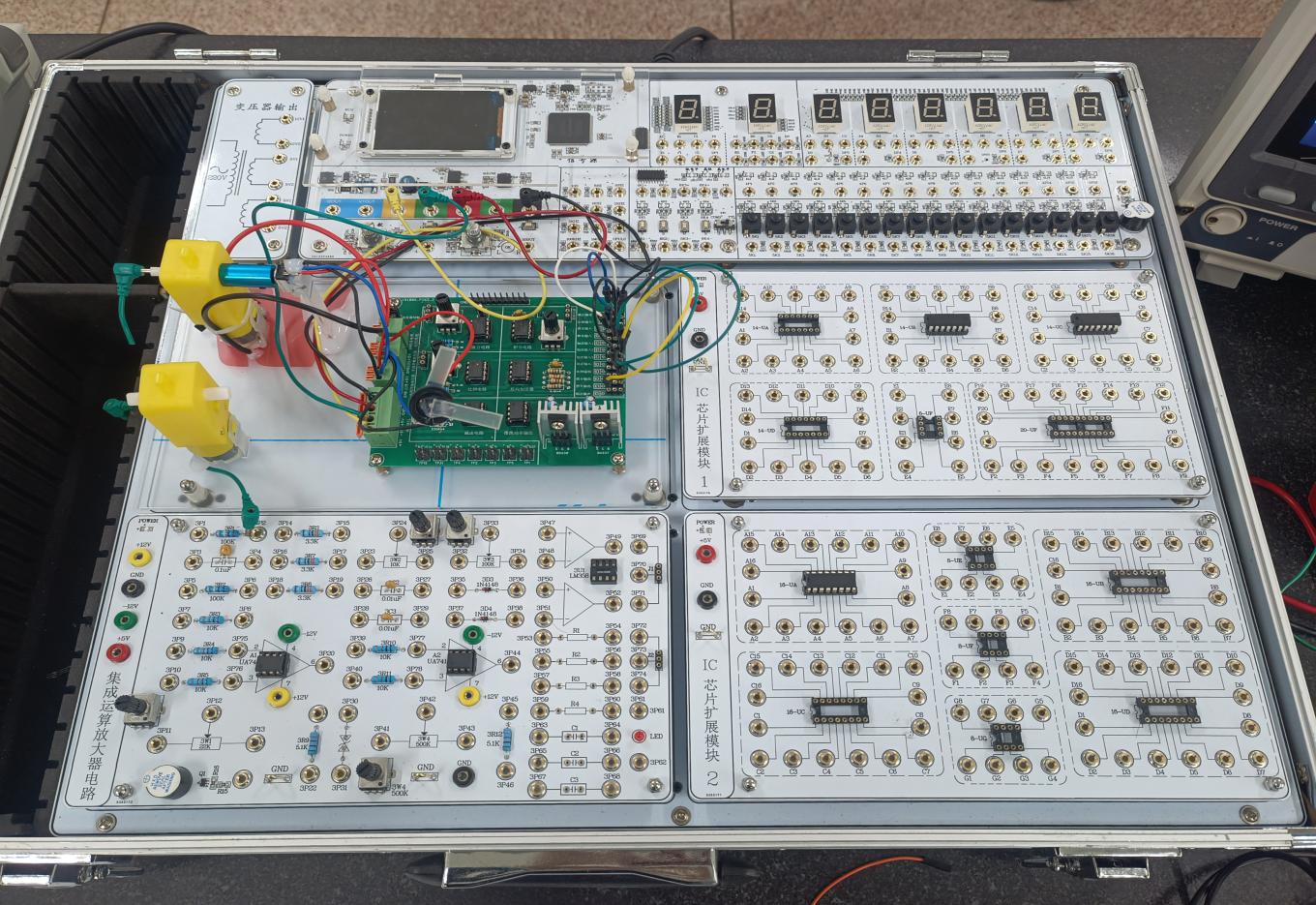

图 10 加速度变化下的恒定幅度振动
通过数值建模及仿真,调整测控电路的电学参数,包括直流参考电压、滤波器参数等对测控电路的收敛性及性能参数的影响,图10为加速度变化下的恒定振动幅度的仿真,验证了理论分析及测控电路的正确性,此部分不做强制性要求,引导学生去尝试,提升软件的应用技能和控制理论水平。
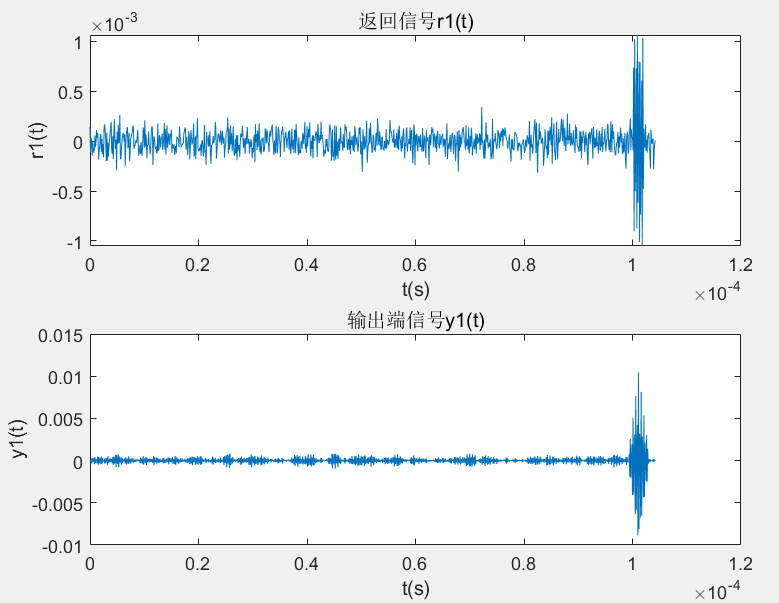

图 11 不同组学生完成的设计电路
图 12 不同组学生实现的恒定幅度振动测试
图11为学生完成的典型测控电路实物(5组),主要通过分立器件完成,部分组还扩展了频率的测量,电子装配水平差异大,部分参加竞赛培训的同学具有较好的工程素养,元器件布局合理,装配可靠性高。图12为测试捕获到的微机械谐振传感器的恒定幅度起振过程,提升了学生利用仪器仪表构建测试方案的能力。
实验报告要求
本课程的实验报告一贯要求“三性”,第一,格式的规范性,第二,内容的完整性,第三,结论的逻辑性。在此基础上,通过内容的完整性和结论的逻辑性来要求任务是的实现。
实验报告需要反映以下工作:
-
实验需求分析
-
实现方案论证
-
理论推导计算
-
电路设计与参数选择
-
电路测试方法
-
实验数据记录
-
数据处理分析
-
实验结果总结
考核要求与方法(限300字)
实验考核注重过程性和多元化,包括以下方面,括号内为各部分权重。
(1)设计验收(20%)
完整的测控电路原理图及测试方案图,包括电路的元器件选型及测试实施步骤。
(2)实验验收(10%)
传感器、元器件PCB布置位置是否合理?测试点预留是否合理?
(3)功能验收(30%)
接口电路能否实现谐振频率和品质因数的测量,能否实现恒定幅度的振动和谐振频率的跟踪?
(4)数值建模与仿真(10%)
电路设计的创新性,自主思考与独立实践能力。
(5)实验成本及数据记录(10%)
是否充分利用实验室已有仪器和材料条件,材料与元器件选择合理性,元器件利用率;测试数据和测量误差是否记录完整,并设计制作合理的表格。
(6)实验报告(20%)
实验报告是否满足格式的规范性、内容的完整性、结论的逻辑性。
项目特色或创新(可空缺,限150字)
项目的特色在于:
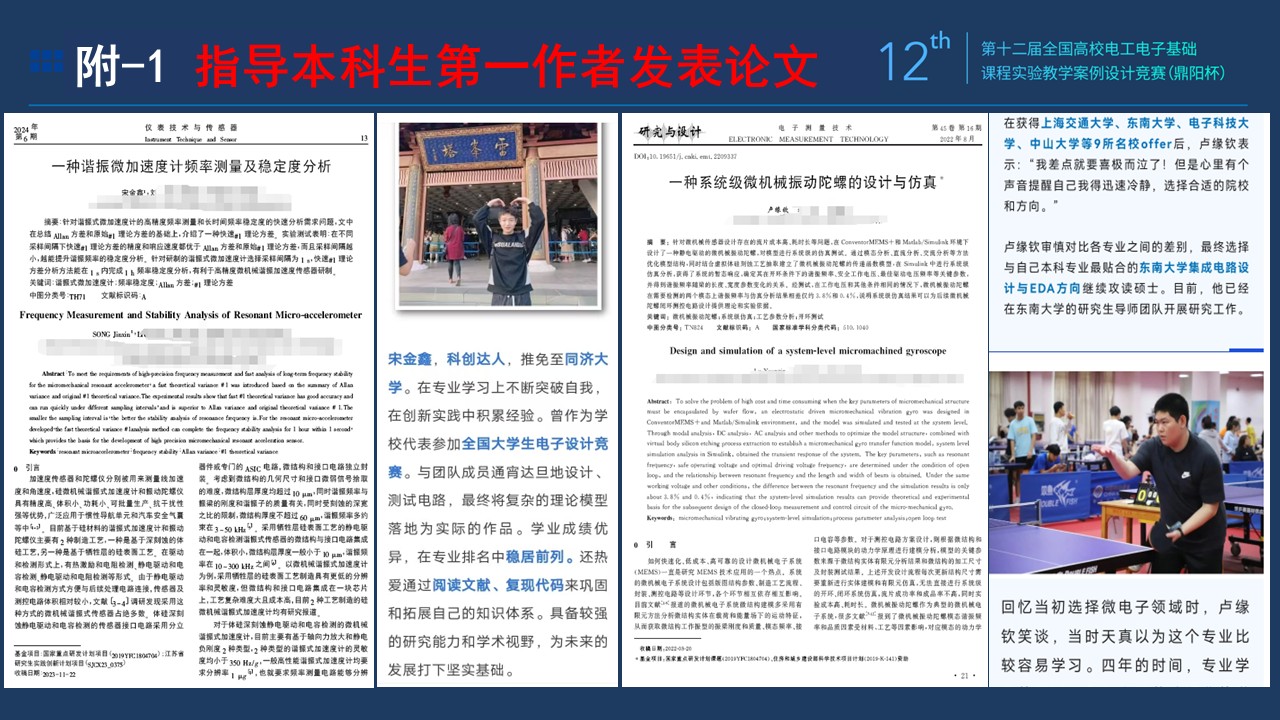
(1)背景工程性
实验可用于电容式传感器的接口检测电路和微机械谐振式传感器的静电驱动电路,已指导本科生发表论文2篇和专利4项。
(2)考核过程性
考核包括了实验的每个环节,涉及课前、课中和课后。
(3)知识综合性
知识点涵盖电路分析基础、模拟电子技术、电子设计自动化、电子工艺实践、传感器原理及应用等课程知识。
(4)方法多样性
仿真与实体实验共存,技术方案多样,元器件多选。
(5)科教融合
实验来源科研项目,科研项目成果融入教学。
附件:
1. 指导本科生第一作者发表科研论文2篇

2. 指导本科生学科竞赛获得国家一等奖(大学生电子设计竞赛)
3. 教师第一作者核心教研论文(实验技术与管理)